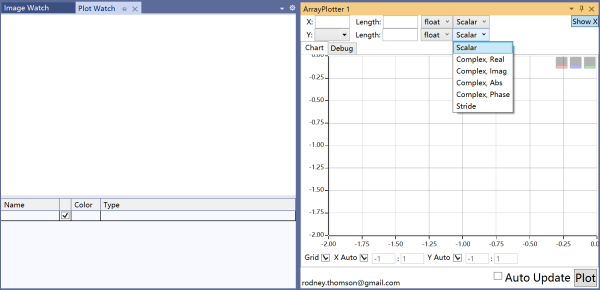
现在主流的IDE都广泛支持安装插件来实现各种有用的功能,在使用Visual Studio 2019/2017开发工具时,如果要在调试状态下查看C++中某个数组,像matlab或python的plot一样画出曲线和直方图,或者查看内存中的图像裸数据,都有插件可以实现,这里介绍三个免费的工具插件:Image Watch查看图像,ArrayPlotter将数组plot成曲线,Graphical Debugging(Plot Watch)查看直方图。



WSL安装Pytorch
参考链接:Enable VIDIA Cuda in WSL2 Win10使用Ubuntu+VSCode写pyt … 阅读更多

论文速览:Automatic Flare Spot Artifact Detection and Removal in Photographs

强光处会出现耀斑伪影,耀斑伪影问题常常出现在手机拍照中,由于镜头设计的缺陷,强光伪影很难从镜头模组设计上去除(iphone12promax的夜间伪影尤为强烈,基本导致拍摄画面不可用),于是耀斑伪影问题交给计算摄影来解决。
这篇博客介绍论文 : 照片中耀斑伪影的自动检测和去除 Automatic Flare Spot Artifact Detection and Removal in Photographs 。2019年 Journal of Mathematical Imaging and Vision。
论文速览:Optical Flow Estimation from a Single Motion-blurred Image
AAAI 2021接收论文,使用单帧模糊图像估计光流。论文地址:https://arxiv.org/pdf/2103.02996v1.pdf
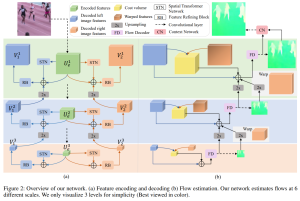
论文主要有三个贡献:一是首次实现通过单帧运动模糊图像估计光流和运动,二是从视频序列中生成运动模糊图像和groundtruth来训练网络,三是将结果用于运动模糊去除和运动目标分割。
保边滤波之BEEPS
BEEPS,即双核书边缘保护平滑滤波器(Bi-Exponential Edge-Preserving Smoo … 阅读更多

从RNN到Seq2Seq

循环神经网络RNN结构被广泛应用与NPL领域,在机器翻译、语音识别、文字识别等方向大放异彩。后来RNN产生了多种变种,其中Seq2Seq结构和Attention机制被证明在语义理解方面有很大的增益。博主也很久没有碰过这块内容了,简单的摘抄和拼凑,权当复习笔记了 0.0