在Pytorch中统计模型大小有一个非常好用的工具opcounters,opcounters用法也非常简单,这篇博客介绍opcounters用法。
月度归档: 2021年11月
几种3D传感器特点分析
目前的3D传感器可以大致划分成如下几种:双目传感器、单目传感器、三角雷达、线激光雷达、dTof、iTof、面阵 … 阅读更多
事件相机(三)事件相机特征提取
事件相机作为一种新型相机,其特征提取方法仍然有许多需要探索的地方,目前主流的事件相机特征提取算法都还是将事件信息二维化或者三维化,并没有很好利用事件相机数据量小的特点,也都把一些关键信息丢掉了,这篇博客主要介绍目前常用的事件相机的特征提取方法。用这些方法编码事件,有一些适合给传统算法使用,有一些适合使用CNN进行处理。
事件相机(二)事件相机应用
前面一篇博客介绍了事件相机的原理和种类,这一篇博客来介绍一下事件相机的具体应用场景,主要也是对 Event Camera Survey的总结梳理。目前学界研究比较多的是 SLAM、Motion Object Detection、Deblur、HDR、高帧率视频等方向。传统方法在SLAM上使用较多,提取事件特征非常繁琐耗费算力,NN方面在处理事件上有一些探索,但都还没完全成熟。目前主要的产品应用还是手机Deblur、插帧和HDR上(目前只有手机的出货量有机会压低Event Camera的成本)。
事件相机(一)事件相机原理
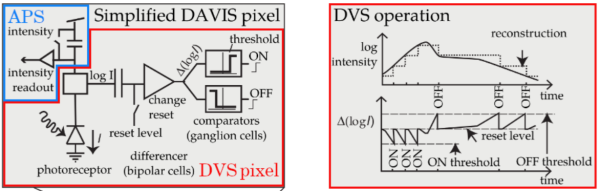
事件相机(Event Camera)目前分为如下几类:DVS、ATIS、DAVIS等,这类基于事件的相机与传统基于全帧输出的CIS相机不同,具有高帧率、高动态、低延时、低带宽的优点,同时也面临着噪声、Flicker、带宽变化等不利因素。这篇博客重点介绍事件相机产生事件的原理,和目前事件相机的分类。