随机采样一致(ransac)算法是一种随机性的参数估计算法,利用Ransac可以实现采样一致性初始配准(SAC-IA)。采样一致性初始配准(SAC-IA)给出一个初始预估的刚性(Rigid)变换矩阵,为更精确的位姿估计算法(如ICP等)提供初始配准状态。
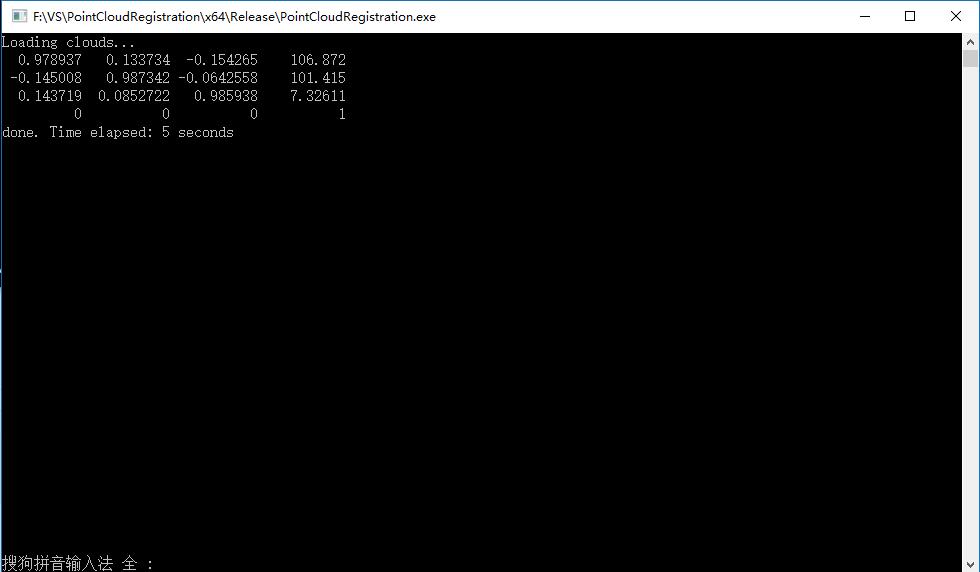
PCL点云库中封装了丰富的点云数据处理函数,利用PCL实现初始点云配准较为容易,于是博主就也实验了一下,效果还不错,就是时间耗费的问题,大概2000个点,迭代2000次,花了5s,实在是太慢了,代码托管在github,比较初级,欢迎指教。
代码
工程使用VS2013update5,pcl1.8.0
P-Chao / SAC-IA
Using PCL (Point Cloud Library) to Registration Point Cloud By SAC-IA, Initial Alignment
https://github.com/P-Chao/SAC-IA/releases
v1.0 只使用了SAC-IA 做初始配准
v2.0 后面还使用了ICP做更精细的配准,可能由于点云数据的关系,看不出什么效果
解释
首先对点云进行降采样,然后计算法向量,根据法向量和点云来计算特征,然后通过特征来进行初始点云配准。
在使用博主代码时,如果采用自己的点云数据,需要注意修改参数,各参数的含义看名字就应该能懂,工程架构直接看主函数就可以,比较基础。
const double FILTER_LIMIT = 1000.0;
const int MAX_SACIA_ITERATIONS = 2000;
const float VOXEL_GRID_SIZE = 3;
const double NORMALS_RADIUS = 20;
const double FEATURES_RADIUS = 50;
const double SAC_MAX_CORRESPONDENCE_DIST = 2000;
const double SAC_MIN_CORRESPONDENCE_DIST = 3;
int main(int argc, char *argv[]){
time_t starttime = time(NULL);
cout << "Loading clouds...\n";
cout.flush();
// open the clouds
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud1(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud2(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("pcd/a3.pcd", *cloud1);
pcl::io::loadPCDFile("pcd/a4.pcd", *cloud2);
// downsample the clouds
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud1ds(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud2ds(new pcl::PointCloud<pcl::PointXYZ>);
voxelFilter(cloud1, cloud1ds, VOXEL_GRID_SIZE);
voxelFilter(cloud2, cloud2ds, VOXEL_GRID_SIZE);
// compute normals
pcl::PointCloud<pcl::Normal>::Ptr normals1 = getNormals(cloud1ds, NORMALS_RADIUS);
pcl::PointCloud<pcl::Normal>::Ptr normals2 = getNormals(cloud2ds, NORMALS_RADIUS);
// compute local features
pcl::PointCloud<pcl::FPFHSignature33>::Ptr features1 = getFeatures(cloud1ds, normals1, FEATURES_RADIUS);
pcl::PointCloud<pcl::FPFHSignature33>::Ptr features2 = getFeatures(cloud2ds, normals2, FEATURES_RADIUS);
//
auto sac_ia = align(cloud1ds, cloud2ds, features1, features2,
MAX_SACIA_ITERATIONS, SAC_MIN_CORRESPONDENCE_DIST, SAC_MAX_CORRESPONDENCE_DIST);
Eigen::Matrix4f init_transform = sac_ia.getFinalTransformation();
pcl::transformPointCloud(*cloud2, *cloud2, init_transform);
pcl::PointCloud<pcl::PointXYZ> final = *cloud1;
final += *cloud2;
cout << init_transform << endl;
cout << "done. Time elapsed: " << time(NULL) - starttime << " seconds\n";
cout.flush();
viewPair(cloud1ds, cloud2ds, cloud1, cloud2);
pcl::io::savePCDFile("result.pcd", final);
//view(final);
return 0;
}
结果
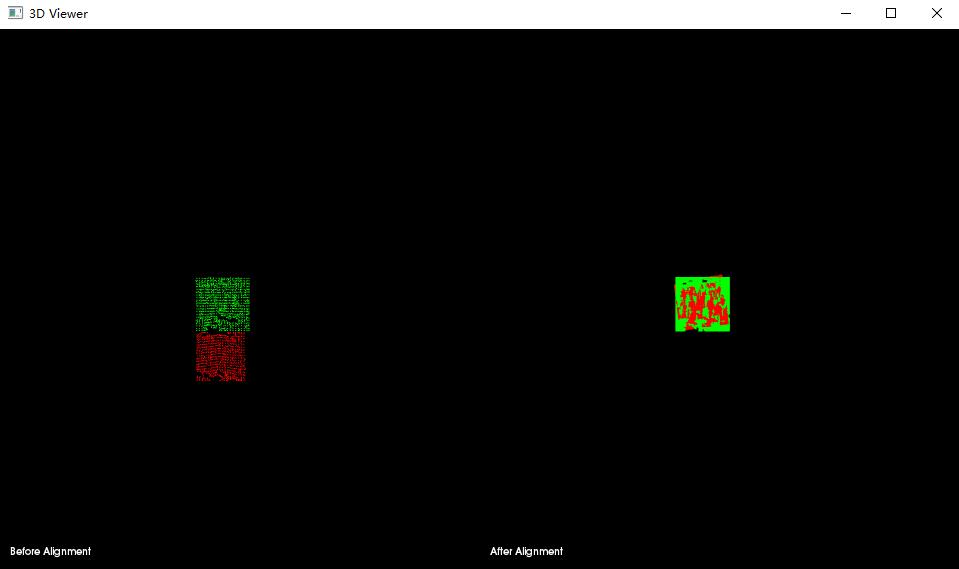
效果不錯啊
比官方示例好多了
http://pointclouds.org/documentation/tutorials/template_alignment.php
謝謝你
代码清楚规范,感谢!
博主,不知是否可以看一看你做的ICP配准代码?我是一个初学者,对很多东西不是很了解 谢谢你
点开文章中的github链接就是的
branch要选features/icp,用的pcl自带的icp算法
可以私聊一下吗
您好,下载了您的代码v1.0,但是会显示如下报错,
严重性 代码 说明 项目 文件 行 禁止显示状态
错误 MSB4019 找不到导入的项目“C:\Program Files\PCL 1.8.0\PCL.Release.x64.props”。请确认 Import 声明“C:\Program Files\PCL 1.8.0\PCL.Release.x64.props”中的表达式正确,且文件位于磁盘上。
找了下,您的代码里面好像没有PCL的属性表,这个我想用的话需要怎么做呀?麻烦您解答一下
http://www.p-chao.com/2016-11-16/pcl库的环境配置及调用(windows8-1vs2013vs2015)/
属性表在这里
严重性 代码 说明 项目 文件 行 禁止显示状态
错误(活动) E0312 不存在用户定义的从 “boost::shared_ptr” 到 “const std::shared_ptr<const pcl::PointRepresentation>” 的适当转换 PointCloudRegistration C:\Users\cl\Desktop\current\Master’s Thesis\CodeReference\SAC-IA-2.0\PointCloudRegistration\registration.cpp 57
您好,用了您的v2.0的代码,有这个报错,Google百度都没找到原因,烦请您看看