点云配准是计算机视觉的热门研究方向,目前对于刚性点云配准的研究比较全面,对于非刚性点云配准算法的研究相对较弱,总体上来说,ICP、卡尔曼滤波等见到的比较多,这篇博客也只是对一些点云配准算法的简单摘抄以做记录。
pcl
pcl::PointCloud与pcl::PointCloud::Ptr的相互转换
pcl::PointCloud与pcl::PointCloud::Ptr的相互转换
PCL实现SAC-IA点云初始配准
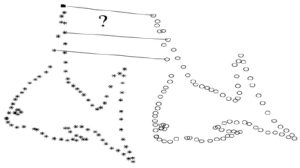
随机采样一致(ransac)算法是一种随机性的参数估计算法,利用Ransac可以实现采样一致性初始配准(SAC-IA)。采样一致性初始配准(SAC-IA)给出一个初始预估的刚性(Rigid)变换矩阵,为更精确的位姿估计算法(如ICP等)提供初始配准状态。
PCL点云库中封装了丰富的点云数据处理函数,利用PCL实现初始点云配准较为容易,于是博主就也实验了一下,效果还不错,就是时间耗费的问题,大概2000个点,迭代2000次,花了5s,实在是太慢了,代码托管在github,比较初级,欢迎指教。
PCL读取点云并可视化
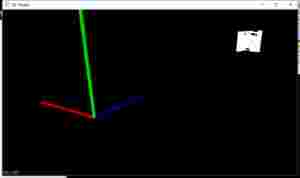
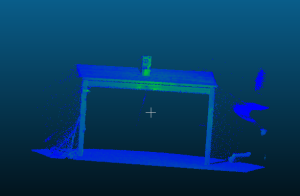
这篇博客提供一个PCL读取点云并可视化的最简Demo,并提供扩充学习资料的链接。其中点云读取比较简单,而可视化比较复杂。
PCL的可视化类有好几号,最强大的是PCLvisualizer,这个类是这篇博客的主要内容。如果只是简单显示点云,可以不需要PCLvisualizer类,调用CloudViewer就可以了。CloudViewer的调用过程更加简单直接,PCLvisualizer更加强大,功能更加丰富。
PCLvisualizer还可以设置鼠标键盘操作回调函数,功能之多,并且开源的PCL也在不断丰富和完善,所以在调用PCLvisualizer时,大部分编程是需要参考文档手册的。
点云数据处理方法概述
结束目标跟踪的研究,回到课题上,接下来要面对的就是点云数据的处理了。这篇博客主要介绍三维计算机视觉中点云数据处理面对的问题,主要方法和技术,概述其特点。这篇博客主要介绍最基本的点云数据处理技术和概念,不会有任何代码。
ICP点云配准就是我们非常熟悉的点云处理算法之一。实际上点云数据在形状检测和分类、立体视觉、运动恢复结构、多视图重建中都有广泛的使用。点云的存储、压缩、渲染等问题也是研究的热点。随着点云采集设备的普及、双目立体视觉技术、VR和AR的发展,点云数据处理技术正成为最有前景的技术之一。PCL是三维点云数据处理领域必备的工具和基本技能,这篇博客也将粗略介绍。
PCL库使用中遇到的一些问题及解决方法
PCL库的各种依赖和冲突让人头大,这里记录了一些PCL使用过程中的问题,长期更新(本次更新时间,2016年12月)。
PCL库的环境配置及调用(Windows8.1+VS2013/VS2015)
 PCL库被广泛用于三维重建,其在三维世界中的地位正如OpenCV在二维世界中的地位。因为其调用了很多第三方库,所以配置极其复杂。官方也推出了简单安装版OneInAll包,这篇博客主要介绍官方简单安装版的方法。由于简单安装版没有CUDA等模块,如果你想用上CUDA就必须得自己重新编译了(博主在使用CUDA8.0,折腾了一个下午放弃了,不过CUDA7.5及以下都有教程)。另外就是,如果想自己编译,这里有一篇很好的博客。如果想快速入门,这里也有一篇很好的博客。
PCL库被广泛用于三维重建,其在三维世界中的地位正如OpenCV在二维世界中的地位。因为其调用了很多第三方库,所以配置极其复杂。官方也推出了简单安装版OneInAll包,这篇博客主要介绍官方简单安装版的方法。由于简单安装版没有CUDA等模块,如果你想用上CUDA就必须得自己重新编译了(博主在使用CUDA8.0,折腾了一个下午放弃了,不过CUDA7.5及以下都有教程)。另外就是,如果想自己编译,这里有一篇很好的博客。如果想快速入门,这里也有一篇很好的博客。