作为研究生,科研工作进入最后阶段,繁忙于各种非技术性问题,已经不太有看Paper分享新东西的精力,网站内容也很久没有更新,考虑到今后可能进入无人驾驶领域,有空时会Post一些科普性的ppt,可能会有些琐碎浅显。个人的考虑是,即使降低原创性和质量,也有必要维持网站内容不断更新,以后有机会从事新的研究,再不断的来分享。
作为计算机视觉研究者,无人驾驶无疑是对目前计算机视觉技术、传感器技术的总结,这篇博客主要介绍(科普)一些无人驾驶的工作原理和关键技术。
关键技术(Key technology):
环境感知技术(Environment Perception)
导航控制技术(Navigation Control)
避障防撞技术(Obstacle Detection & Avoidance)
信息通讯技术(Information Communication)
乘员安保技术(Passenger Safety)
人机交互技术(Human-machine)
状态监测技术(Condition Monitoring)
调度管理技术(Accommodating & Management)

工作原理
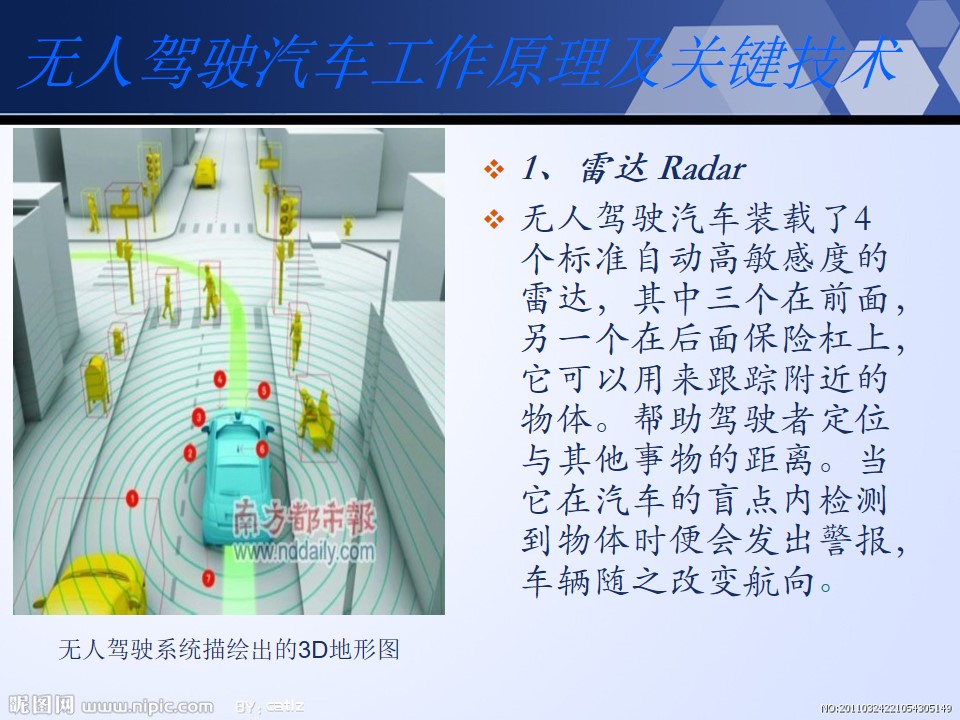
雷达:当事故欲望系统在汽车的盲点探测到物体时,该系统就会触发警报
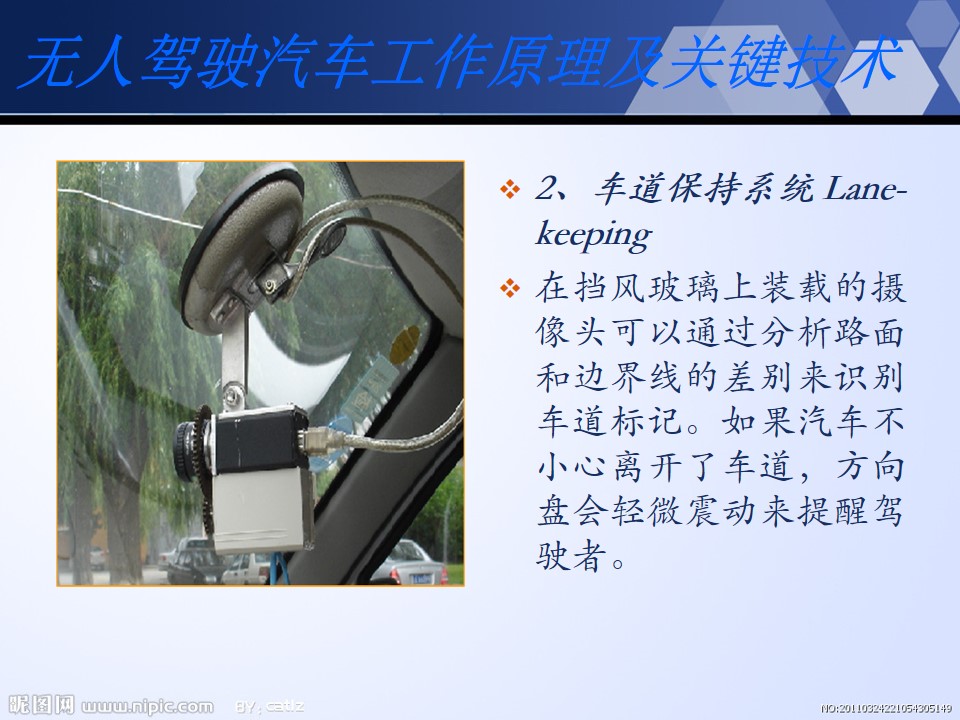
车道导航:安装在后视镜后方的相机将通过对车道线的识别,以区分路面和车道边界线
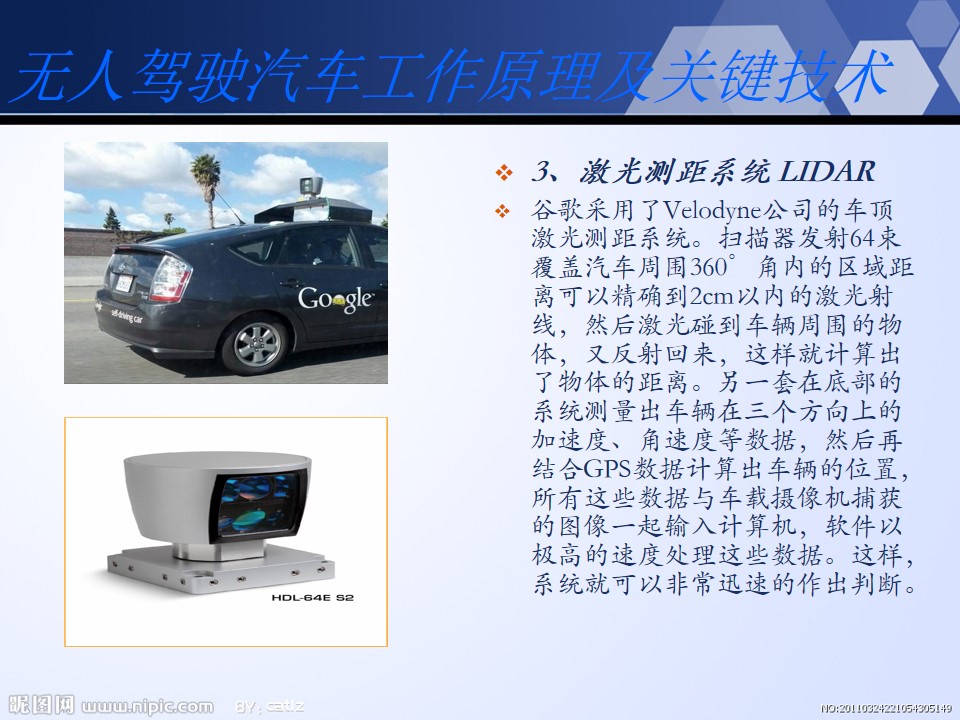
激光雷达:车顶测距系统覆盖360度的区域
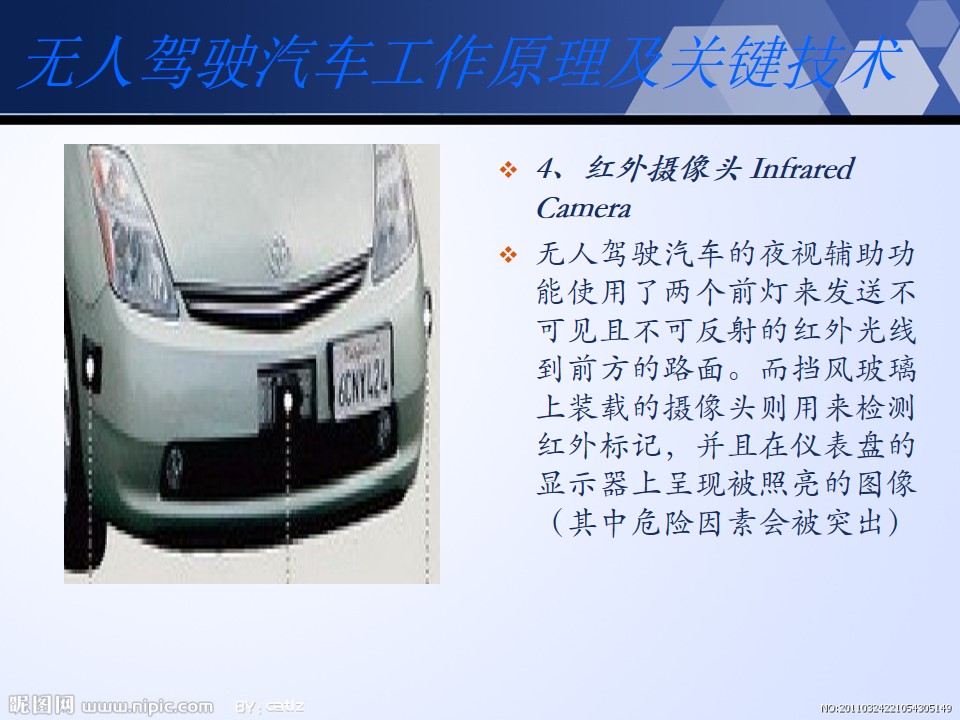
红外相机:红外摄像头提供夜间视野
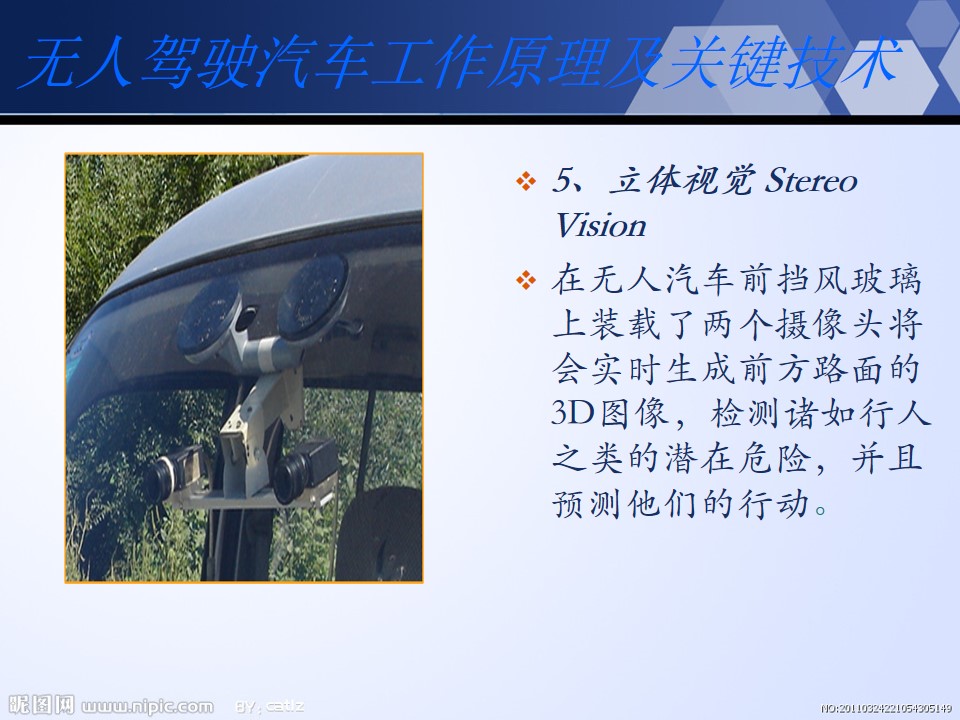
立体图像:给出车前方的3D图像,并标出行人和动物等危险状况
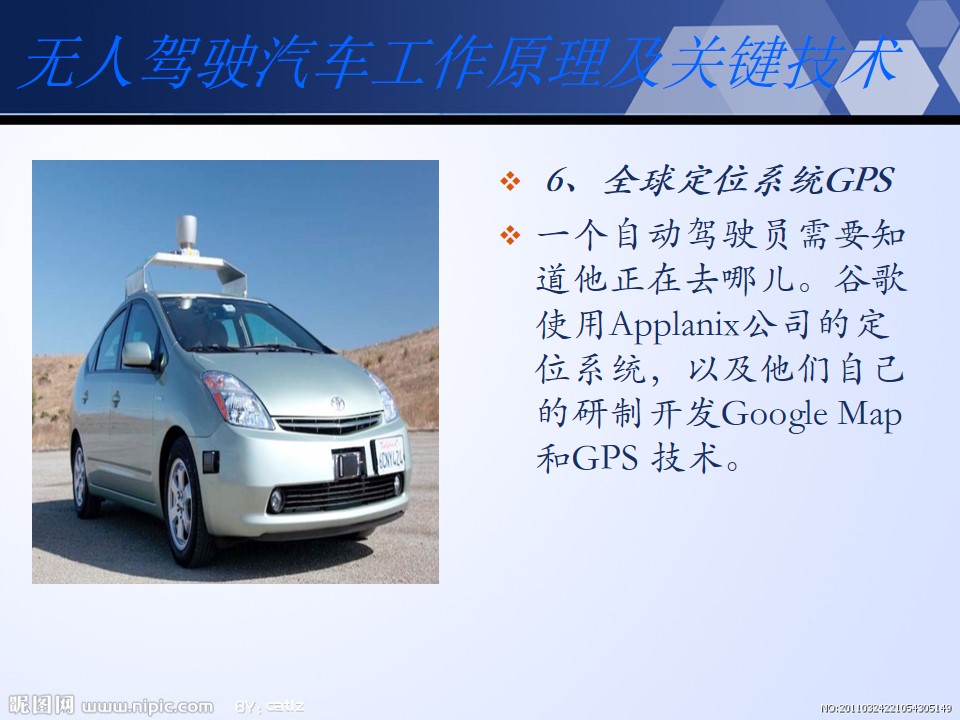
GPS:在GPS覆盖范围内提供更多位置细节
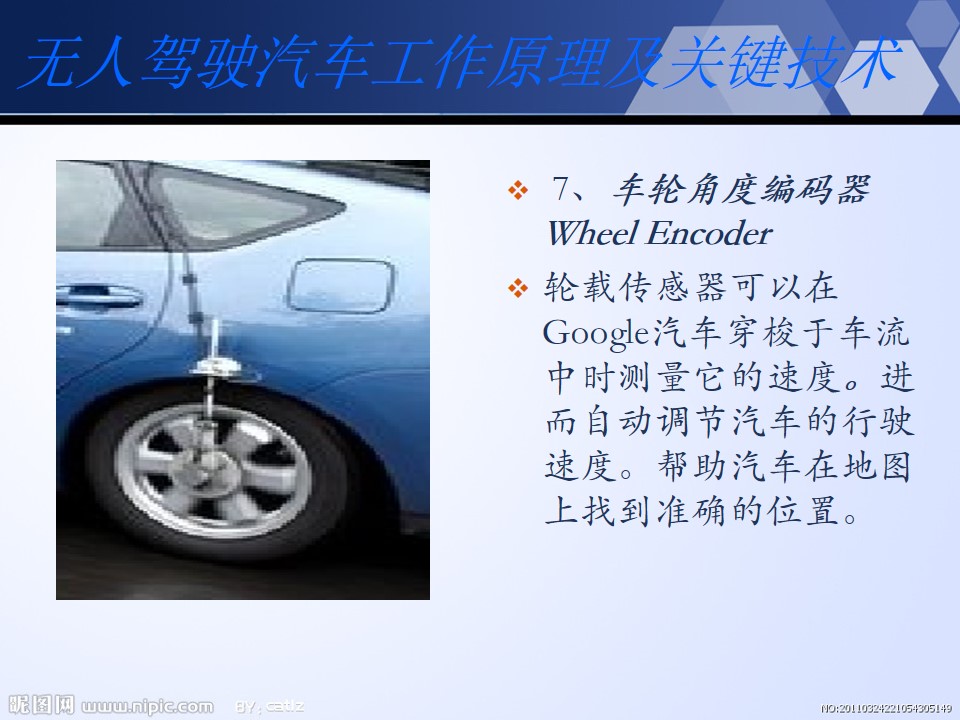
车轮编码器:汽车在行驶过程中自动调节车速