视图几何
欧拉角(Eular Angle)详解
在三维空间中,角向自由度常常用欧拉角表示,就是说欧拉角是形容两个坐标空间旋转关系的,所以思考问题时需要一定的立体感,而在欧拉角计算过程中,有常常涉及到一些关系计算和数学转换。
这篇博客摘录了即几篇优质博客的内容,涉及欧拉角、旋转矩阵、旋转向量、欧拉角换算等诸多问题。
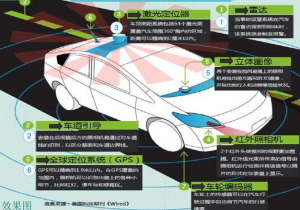
无人驾驶汽车工作原理及关键技术
作为研究生,科研工作进入最后阶段,繁忙于各种非技术性问题,已经不太有看Paper分享新东西的精力,网站内容也很久没有更新,考虑到今后可能进入无人驾驶领域,有空时会Post一些科普性的ppt,可能会有些琐碎浅显。个人的考虑是,即使降低原创性和质量,也有必要维持网站内容不断更新,以后有机会从事新的研究,再不断的来分享。
作为计算机视觉研究者,无人驾驶无疑是对目前计算机视觉技术、传感器技术的总结,这篇博客主要介绍(科普)一些无人驾驶的工作原理和关键技术。
双目立体视觉中的相机标定与机器人位置标定
在基于双目立体视觉的工业机器人抓取系统中涉及三个坐标系:世界坐标系(现实世界中的坐标位置)、机器人坐标系(以机器人基座标 标识的坐标位置)和 相机坐标系(以双目相机中某相机光心位置为原点,光轴作为参考坐标轴的坐标表示)。这篇博客主要介绍立体视觉系统中坐标转化,以及实际操作中如何进行相机的标定和机器人的标定。
这篇博客主要是博主的实验流程记录,代码托管于github。
从旋转矩阵计算欧拉角
旋转矩阵和欧拉角之间的正向转换关系比较好推理,而逆向变换就显得不是那么容易了。这篇博客介绍由旋转矩阵计算欧拉角的方法,参考了一篇Paper:Computing Euler angles from a rotation matrix。Paper本身介绍的还是比较清楚的,这篇博客最后附了转换计算的代码,包括文章作者提供的Matlab版本和博主提供的C/C++版本,希望能有用。
Matlab使用interp2裁剪倾斜(旋转)矩形块
在图像处理中,我们常常需要裁剪出图像中的一个矩形块,matlab提供的imcrop函数可以裁剪出矩形块,但是如果我们想裁剪倾斜的矩形块,该函数将无能为力。于是博主贡献了自己的代码。
立体视觉中的内参矩阵、基础矩阵、本质矩阵
立体视觉中的矩阵变换比较多。总的来说,内参矩阵 K是针对单相机的,通过焦距和主点位置直接表示了相机坐标系和图像坐标系之间的关系,如果考虑镜头的畸变,还需要有畸变系数,如果图像传感器有倾斜,还需要有倾斜因子。基础矩阵和本质矩阵是针对双目的,其中基础矩阵 F根据左右相机的RT关系,表示了对极线关系,基础矩阵是左右摄像机坐标系之间的关系,求解基础矩阵的核心是求左右相机的RT。本质矩阵 E是图像坐标系下的,结合了基础矩阵和内参矩阵,直接反应左右图像坐标系下对应点像素坐标的关系。
OpenCV进行各种矩阵变换及变换参数求解
OpenCV可以处理许多2D、3D的变换矩阵,包括但不局限于2D放射变换矩阵(2×3),二维点对的最优单映射变换矩阵H(3×3),四个二维点对之间的透射变换矩阵(3×3),多对三维点之间的旋转平移矩阵(3×4),计算多个点对之间的基矩阵和位姿变换矩阵等。这篇博客对这些变换函数进行了总结,可以通过该博客给出的名字搜索函数进行查询。
张正友标定工具箱中的Disable View问题和标定结果NAN问题
前面介绍过张正友标定的原理和张正友标定工具箱的使用,现在就实际使用中遇到Disable View 和 矩阵奇异导致的NAN问题 进行解释和说明。
张正友标定法(二)张正友Matlab工具箱的使用
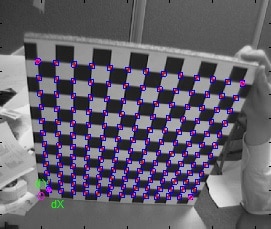 有两份资料,一是加州理工大学开发的标定工具箱,其中实现了全套张正友标定,网站也同样也有详细的使用文档。另一份是OpenCV的标定工具箱,其中使用的也是张正友标定,只不过略有简化。如果你不是直接使用C++书写标定程序的话,强烈推荐加州理工大学的标定工具箱。
有两份资料,一是加州理工大学开发的标定工具箱,其中实现了全套张正友标定,网站也同样也有详细的使用文档。另一份是OpenCV的标定工具箱,其中使用的也是张正友标定,只不过略有简化。如果你不是直接使用C++书写标定程序的话,强烈推荐加州理工大学的标定工具箱。
张正友Matlab工具箱使用手册,这份文档详细介绍了该工具箱的使用。这篇博客是对这份文档的补充,所以,如果你本着学习工具箱使用方法而来,请点击题头的链接。学习玩使用手册,这篇博客的内容可能会对你进一步了解工具箱有一定帮助。
再附上张正友1998年的Paper,我们开始学习吧。
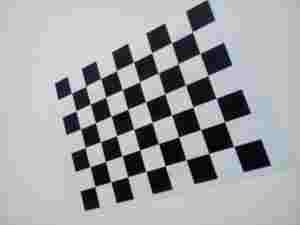
张正友标定法(一)张正友标定法的数学推导
张正友标定法提出于1998年,自此相机标定只需要自行打印一张棋盘格就可以实现0.5pixel以上的精度,这样的精度已经可以满足绝大多数应用场合的要求。博主这一系列的博客分为三篇,本篇是第一篇,着重介绍数学推导,后面的博客会陆续介绍Matlab工具箱的使用及博主自己对代码的解释和修改。
Matlab解析pfm格式图像
关于pfm格式,从来没有官方权威的定义,但是常常在一些场合用到,如生物医学成像,红外成像等,尤其是其浮点方式的存储的位图使得其在科研和学习场合应用都很方便,Middlebury数据库中的视差图像就是以pfm格式进行存储的。
立体视觉BenchMark——Middlebury
立体视觉是计算机视觉中最为重要的方向之一,在视差检测方面KITTI、MiddleBury提供的数据集常被作为Benchmark。