传统图像配准算法有基于特征点、变换域、参数求解几种,其中参数求解算法中,ECC具有很好的速度和硬件友好的实现,这篇博客会看下论文推导和opencv的开源实现。
〇、论文下载:
ECC论文有两篇paper,博主截图VISAPP_2018这篇paper的,PAMI里面推导更加详细,一般看PAMI这篇就可以了。
一、ECC迭代推导
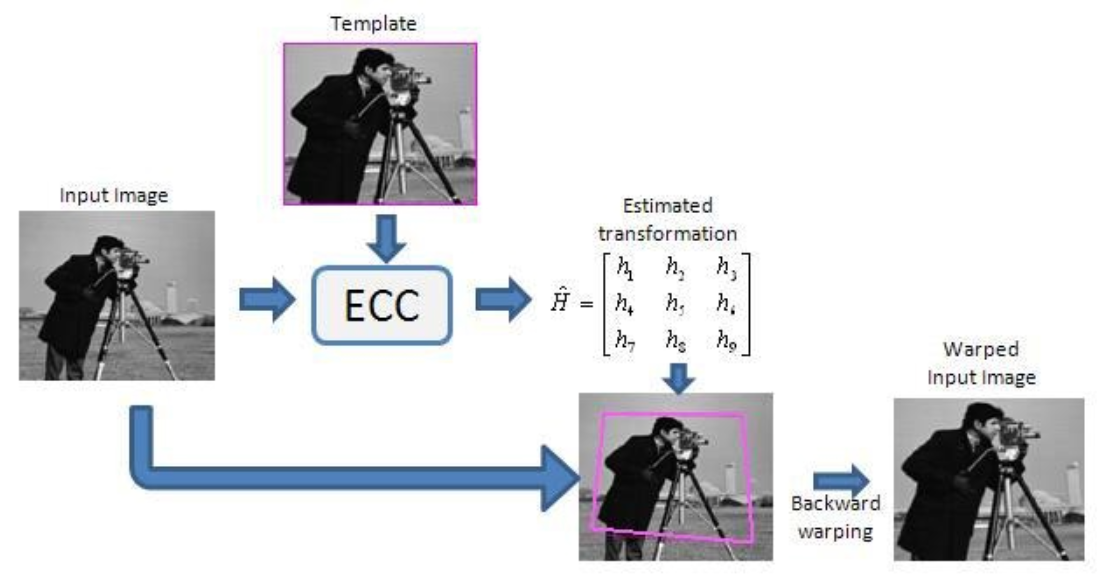
参数化的图像配置问题可以被表示为,减少warp图像经过参数p warp和经过alpha光照恒常补偿后和参考图像误差。

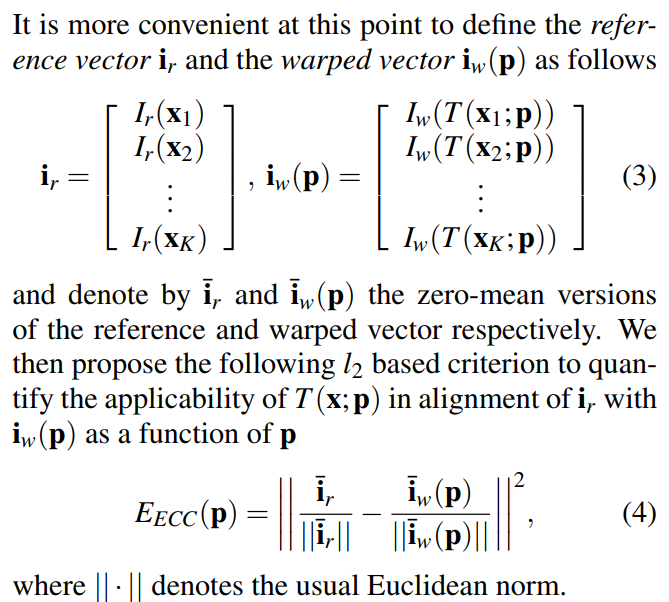
我们将图像Ir和Iw都减去均值,除以norm2范数(进行归一化),就散Ir和Iw(p)之间的偏差。现在的问题就是最小化这个Error。
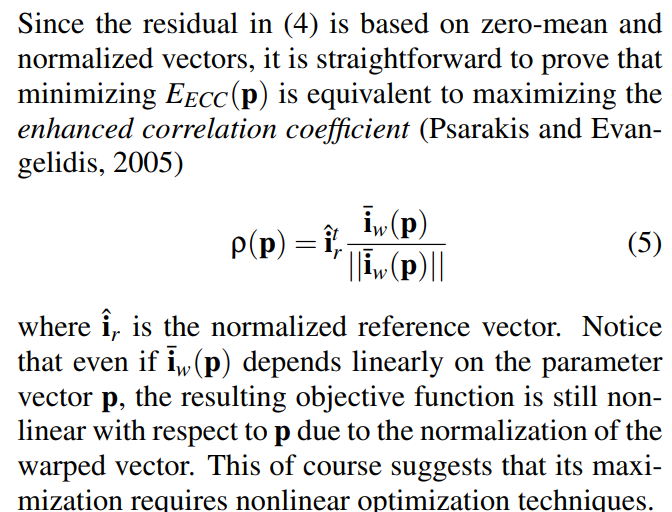
最小化Eecc的过程也可以被转化为最大化rho(p)的过程,rho(p)就是增强相关系数
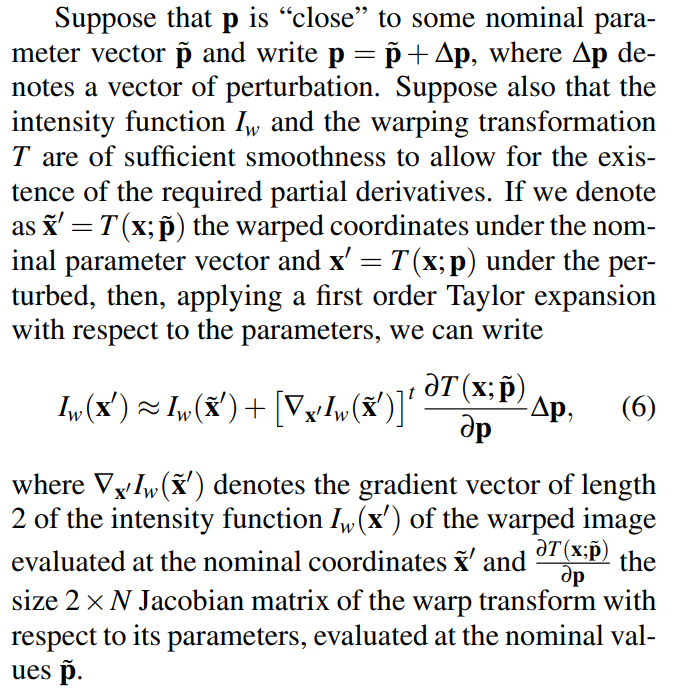
我们最大化pho(p),p=bar_p+delta_p的过程表达出来,然后进行泰勒展开,泰勒我们只取一阶近似,可以展开成如下公式
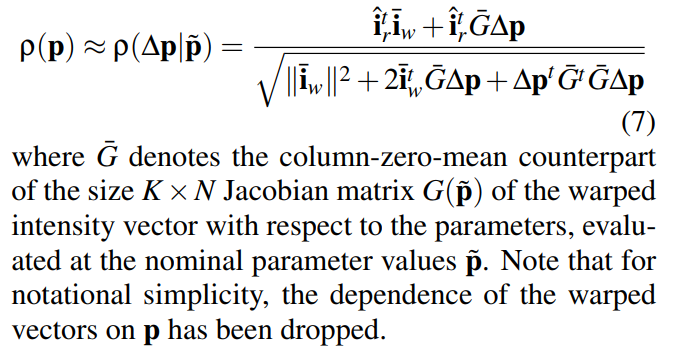
可以看到,这样公式中已经和p没有关系了,只和delta_p 还有 G (梯度)有关系,这样有什么好处呢?就是我们知道梯度的话,就可以迭代求解rho(p)的最大值,这和传统光流很像。
寻找delta_p使得前面公式的值最大,这个问题已经被证明是有解析解的,这里解有两种情况:
第一种情况直接可以写出解析解(opencv种只实现了这第一种情况,式8和式9)
第二种情况,我们没办法明确给出解析解,只能知道解的范围
(这部分推导在PAMI2018哪个paper里面写的详细点儿,附录里有推导)
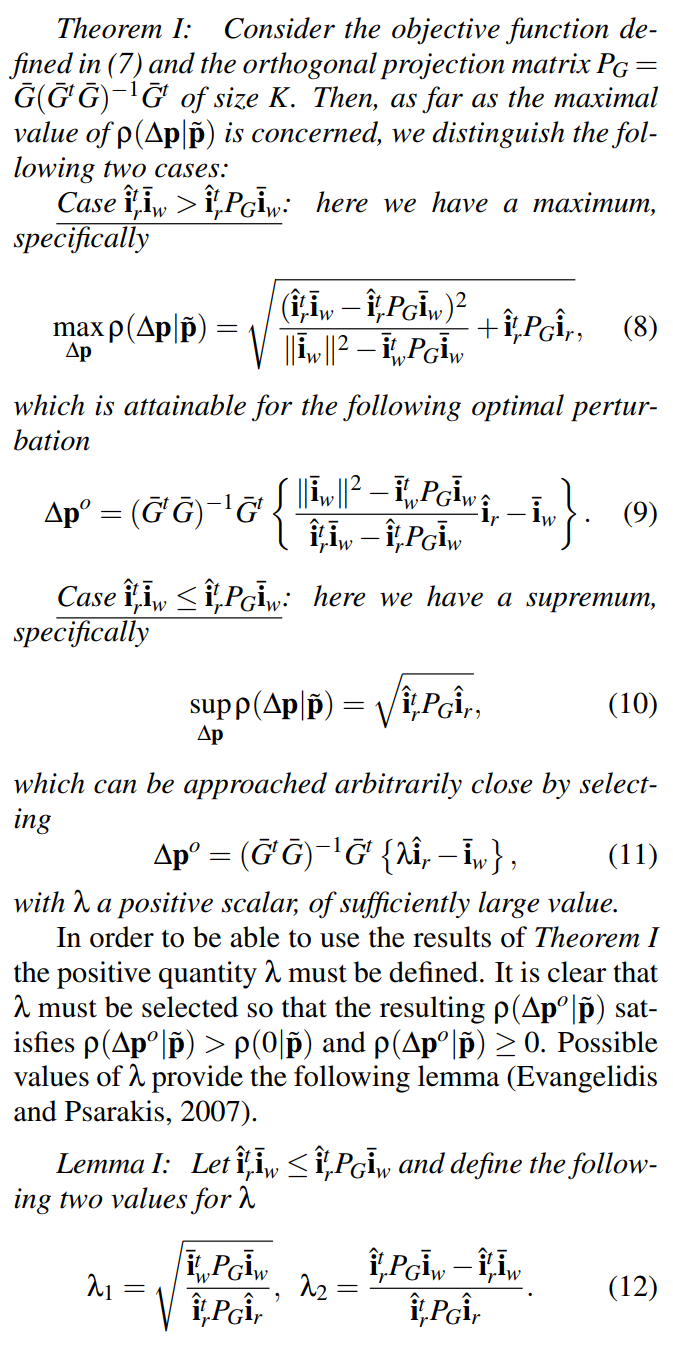
通过推到rho关于lambda的单调性,可以得到下面两个不等式,对于lamda>lamda1的情况,rho>rho(0), 对于lamda>=lamda2的情况,rho>=0,所以可以知道lambda的上界

我们重新回来看我们配准过程中的迭代问题,依旧是把参数进行泰勒展开
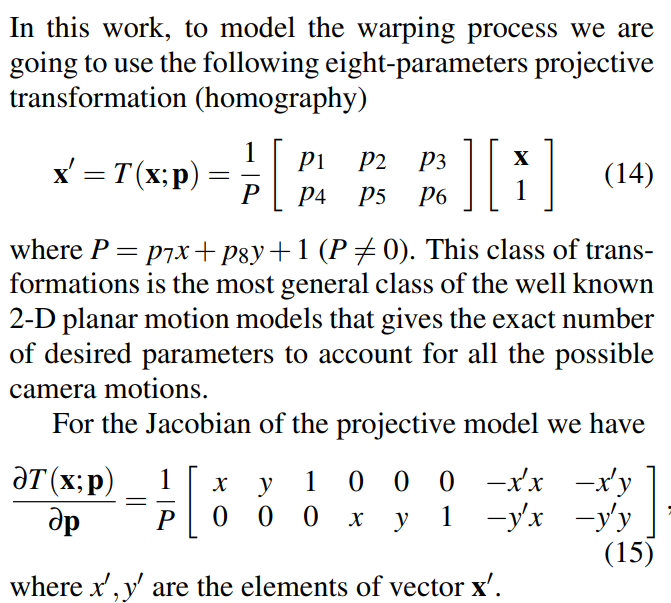
其中T(p)的jacobian根据变换参数类型不同可以写成不同的形式,对于仿射变换而言,dT/dp 可以写成下面的矩阵
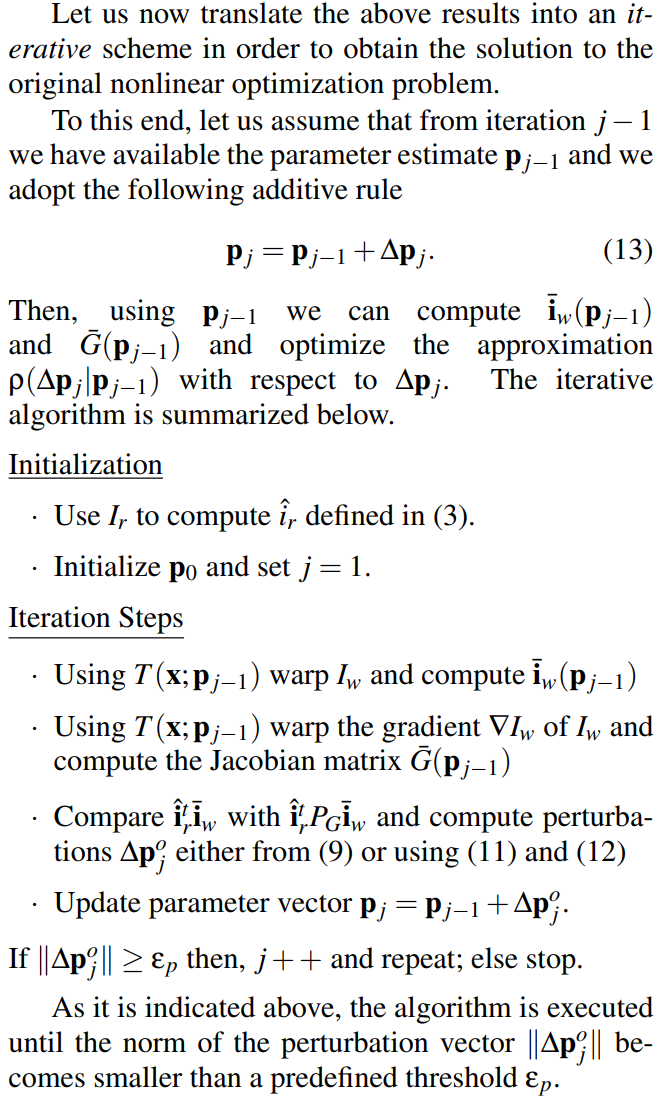
那么ECC的迭代过成可以做如果表述:
二、开源源码解读
接下来我们看下opencv中的ecc源码(全部源码位于video模块中的ecc.cpp),实现还是非常简洁的。关于源码的理解:
- 代码中都是矩阵乘法等并行操作,很适合GPU或者DSP等做并行加速。
- opencv源码中可以输出error,如果不需要输出error,把error的表达带入error_projection的计算中,error_projection可以直接由lambda、image_projection和template_projection得到,可以减少一些计算量。
- 输入可以配mask,不要mask的话可以去掉,也有优化不少时间
- opencv的代码中直接使用了论文中 第一种情况下的解,对第二种情况下的解,opencv 直接 throw error,并未对第二种解单独处理,这一点博主这还没有理解透彻,有理解的小伙伴可以留言告诉博主
double cv::findTransformECC(InputArray templateImage,
InputArray inputImage,
InputOutputArray warpMatrix,
int motionType,
TermCriteria criteria,
InputArray inputMask,
int gaussFiltSize)
{
Mat src = templateImage.getMat();//template image
Mat dst = inputImage.getMat(); //input image (to be warped)
Mat map = warpMatrix.getMat(); //warp (transformation)
CV_Assert(!src.empty());
CV_Assert(!dst.empty());
// If the user passed an un-initialized warpMatrix, initialize to identity
if(map.empty()) {
int rowCount = 2;
if(motionType == MOTION_HOMOGRAPHY)
rowCount = 3;
warpMatrix.create(rowCount, 3, CV_32FC1);
map = warpMatrix.getMat();
map = Mat::eye(rowCount, 3, CV_32F);
}
if( ! (src.type()==dst.type()))
CV_Error( Error::StsUnmatchedFormats, "Both input images must have the same data type" );
//accept only 1-channel images
if( src.type() != CV_8UC1 && src.type()!= CV_32FC1)
CV_Error( Error::StsUnsupportedFormat, "Images must have 8uC1 or 32fC1 type");
if( map.type() != CV_32FC1)
CV_Error( Error::StsUnsupportedFormat, "warpMatrix must be single-channel floating-point matrix");
CV_Assert (map.cols == 3);
CV_Assert (map.rows == 2 || map.rows ==3);
CV_Assert (motionType == MOTION_AFFINE || motionType == MOTION_HOMOGRAPHY ||
motionType == MOTION_EUCLIDEAN || motionType == MOTION_TRANSLATION);
if (motionType == MOTION_HOMOGRAPHY){
CV_Assert (map.rows ==3);
}
CV_Assert (criteria.type & TermCriteria::COUNT || criteria.type & TermCriteria::EPS);
const int numberOfIterations = (criteria.type & TermCriteria::COUNT) ? criteria.maxCount : 200;
const double termination_eps = (criteria.type & TermCriteria::EPS) ? criteria.epsilon : -1;
int paramTemp = 6;//default: affine
switch (motionType){
case MOTION_TRANSLATION:
paramTemp = 2;
break;
case MOTION_EUCLIDEAN:
paramTemp = 3;
break;
case MOTION_HOMOGRAPHY:
paramTemp = 8;
break;
}
const int numberOfParameters = paramTemp;
const int ws = src.cols;
const int hs = src.rows;
const int wd = dst.cols;
const int hd = dst.rows;
Mat Xcoord = Mat(1, ws, CV_32F);
Mat Ycoord = Mat(hs, 1, CV_32F);
Mat Xgrid = Mat(hs, ws, CV_32F);
Mat Ygrid = Mat(hs, ws, CV_32F);
float* XcoPtr = Xcoord.ptr<float>(0);
float* YcoPtr = Ycoord.ptr<float>(0);
int j;
for (j=0; j<ws; j++)
XcoPtr[j] = (float) j;
for (j=0; j<hs; j++)
YcoPtr[j] = (float) j;
repeat(Xcoord, hs, 1, Xgrid);
repeat(Ycoord, 1, ws, Ygrid);
Xcoord.release();
Ycoord.release();
Mat templateZM = Mat(hs, ws, CV_32F);// to store the (smoothed)zero-mean version of template
Mat templateFloat = Mat(hs, ws, CV_32F);// to store the (smoothed) template
Mat imageFloat = Mat(hd, wd, CV_32F);// to store the (smoothed) input image
Mat imageWarped = Mat(hs, ws, CV_32F);// to store the warped zero-mean input image
Mat imageMask = Mat(hs, ws, CV_8U); // to store the final mask
Mat inputMaskMat = inputMask.getMat();
//to use it for mask warping
Mat preMask;
if(inputMask.empty())
preMask = Mat::ones(hd, wd, CV_8U);
else
threshold(inputMask, preMask, 0, 1, THRESH_BINARY);
//gaussian filtering is optional
src.convertTo(templateFloat, templateFloat.type());
GaussianBlur(templateFloat, templateFloat, Size(gaussFiltSize, gaussFiltSize), 0, 0);
Mat preMaskFloat;
preMask.convertTo(preMaskFloat, CV_32F);
GaussianBlur(preMaskFloat, preMaskFloat, Size(gaussFiltSize, gaussFiltSize), 0, 0);
// Change threshold.
preMaskFloat *= (0.5/0.95);
// Rounding conversion.
preMaskFloat.convertTo(preMask, preMask.type());
preMask.convertTo(preMaskFloat, preMaskFloat.type());
dst.convertTo(imageFloat, imageFloat.type());
GaussianBlur(imageFloat, imageFloat, Size(gaussFiltSize, gaussFiltSize), 0, 0);
// needed matrices for gradients and warped gradients
Mat gradientX = Mat::zeros(hd, wd, CV_32FC1);
Mat gradientY = Mat::zeros(hd, wd, CV_32FC1);
Mat gradientXWarped = Mat(hs, ws, CV_32FC1);
Mat gradientYWarped = Mat(hs, ws, CV_32FC1);
// calculate first order image derivatives
Matx13f dx(-0.5f, 0.0f, 0.5f);
filter2D(imageFloat, gradientX, -1, dx);
filter2D(imageFloat, gradientY, -1, dx.t());
gradientX = gradientX.mul(preMaskFloat);
gradientY = gradientY.mul(preMaskFloat);
// matrices needed for solving linear equation system for maximizing ECC
Mat jacobian = Mat(hs, ws*numberOfParameters, CV_32F);
Mat hessian = Mat(numberOfParameters, numberOfParameters, CV_32F);
Mat hessianInv = Mat(numberOfParameters, numberOfParameters, CV_32F);
Mat imageProjection = Mat(numberOfParameters, 1, CV_32F);
Mat templateProjection = Mat(numberOfParameters, 1, CV_32F);
Mat imageProjectionHessian = Mat(numberOfParameters, 1, CV_32F);
Mat errorProjection = Mat(numberOfParameters, 1, CV_32F);
Mat deltaP = Mat(numberOfParameters, 1, CV_32F);//transformation parameter correction
Mat error = Mat(hs, ws, CV_32F);//error as 2D matrix
const int imageFlags = INTER_LINEAR + WARP_INVERSE_MAP;
const int maskFlags = INTER_NEAREST + WARP_INVERSE_MAP;
// iteratively update map_matrix
double rho = -1;
double last_rho = - termination_eps;
for (int i = 1; (i <= numberOfIterations) && (fabs(rho-last_rho)>= termination_eps); i++)
{
// warp-back portion of the inputImage and gradients to the coordinate space of the templateImage
if (motionType != MOTION_HOMOGRAPHY)
{
warpAffine(imageFloat, imageWarped, map, imageWarped.size(), imageFlags);
warpAffine(gradientX, gradientXWarped, map, gradientXWarped.size(), imageFlags);
warpAffine(gradientY, gradientYWarped, map, gradientYWarped.size(), imageFlags);
warpAffine(preMask, imageMask, map, imageMask.size(), maskFlags);
}
else
{
warpPerspective(imageFloat, imageWarped, map, imageWarped.size(), imageFlags);
warpPerspective(gradientX, gradientXWarped, map, gradientXWarped.size(), imageFlags);
warpPerspective(gradientY, gradientYWarped, map, gradientYWarped.size(), imageFlags);
warpPerspective(preMask, imageMask, map, imageMask.size(), maskFlags);
}
Scalar imgMean, imgStd, tmpMean, tmpStd;
meanStdDev(imageWarped, imgMean, imgStd, imageMask);
meanStdDev(templateFloat, tmpMean, tmpStd, imageMask);
subtract(imageWarped, imgMean, imageWarped, imageMask);//zero-mean input
templateZM = Mat::zeros(templateZM.rows, templateZM.cols, templateZM.type());
subtract(templateFloat, tmpMean, templateZM, imageMask);//zero-mean template
const double tmpNorm = std::sqrt(countNonZero(imageMask)*(tmpStd.val[0])*(tmpStd.val[0]));
const double imgNorm = std::sqrt(countNonZero(imageMask)*(imgStd.val[0])*(imgStd.val[0]));
// calculate jacobian of image wrt parameters
switch (motionType){
case MOTION_AFFINE:
image_jacobian_affine_ECC(gradientXWarped, gradientYWarped, Xgrid, Ygrid, jacobian);
break;
case MOTION_HOMOGRAPHY:
image_jacobian_homo_ECC(gradientXWarped, gradientYWarped, Xgrid, Ygrid, map, jacobian);
break;
case MOTION_TRANSLATION:
image_jacobian_translation_ECC(gradientXWarped, gradientYWarped, jacobian);
break;
case MOTION_EUCLIDEAN:
image_jacobian_euclidean_ECC(gradientXWarped, gradientYWarped, Xgrid, Ygrid, map, jacobian);
break;
}
// calculate Hessian and its inverse
project_onto_jacobian_ECC(jacobian, jacobian, hessian);
hessianInv = hessian.inv();
const double correlation = templateZM.dot(imageWarped);
// calculate enhanced correlation coefficient (ECC)->rho
last_rho = rho;
rho = correlation/(imgNorm*tmpNorm);
if (cvIsNaN(rho)) {
CV_Error(Error::StsNoConv, "NaN encountered.");
}
// project images into jacobian
project_onto_jacobian_ECC( jacobian, imageWarped, imageProjection);
project_onto_jacobian_ECC(jacobian, templateZM, templateProjection);
// calculate the parameter lambda to account for illumination variation
imageProjectionHessian = hessianInv*imageProjection;
const double lambda_n = (imgNorm*imgNorm) - imageProjection.dot(imageProjectionHessian);
const double lambda_d = correlation - templateProjection.dot(imageProjectionHessian);
if (lambda_d <= 0.0)
{
rho = -1;
CV_Error(Error::StsNoConv, "The algorithm stopped before its convergence. The correlation is going to be minimized. Images may be uncorrelated or non-overlapped");
}
const double lambda = (lambda_n/lambda_d);
// estimate the update step delta_p
error = lambda*templateZM - imageWarped;
project_onto_jacobian_ECC(jacobian, error, errorProjection);
deltaP = hessianInv * errorProjection;
// update warping matrix
update_warping_matrix_ECC( map, deltaP, motionType);
}
// return final correlation coefficient
return rho;
}
opencv 的更新僅使用 (9) 哦,而非(12)。
source code中 227 “if (lambda_d <= 0.0)" , 代表著 (11)和(12) 不會去執行並且報錯。
然後我不是很懂,為何opencv僅更新(9), 但該論文(ECC_PAMI_2008 中的 3.1段落中的Remark )作者認為更新(11)和(12)是有必要的.