开始之前需要一些前置知识,关于SAM请移步:SAM论文笔记, 关于ViT基础请移步:Vision Transformer,关于MAE请移步知乎:MAE(Masked Autoencoders) – 知乎 (zhihu.com)。
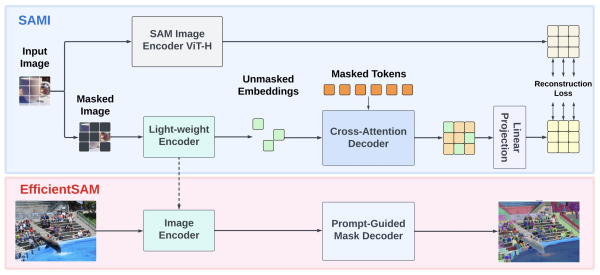
SAM的解码器已经足够快,但是图像编码器用的ViT还是很大,于是很多工作就在SAM基础上改进性能,进行轻量化,其中有一些比较出色的工作 比如 MobileSAM 、 FastSAM 和 EfficientSAM 等,已经将SAM推到了相当轻量。这篇博客主要是EfficientSAM的论文笔记。