这部门内容是博主的个人笔记,没有代码,只有思路,也不公开代码。
QRCode二维码的关键是三个定位点的获取,我们借助AprilTag,解码部分的算法和ZXing相同(实践证明非常鲁棒)。
a blog driven by interest~

随着OpenCV4.0.0的正式Release,OpenCV已经走过了18个年头,OpenCV4中加入一些有意思的新算法,其中就包括二维码识别。OpenCV的二维码识别究竟如何呢?和其它开源二维码识别库相比有哪些优劣呢?博主将带你简析代码,分析性能。

OpenCV4.0.0正式release了,其中加入了二维码识别功能,有幸博主最近开始折腾二维码识别,发现二维码的核心就是那三个定位点和辅助对齐点。ZXing和OpenCV都是通过二维码定位点的11311来进行定位的,这是利用了二维码最显著的特征。但是博主会处理一些变态的情况,比如过曝光到11311定位点无法找到(即图像中定位点的黑白间隔不是1:1:3:1:1),于是就需要通过其它方法来找定位点了。一个标志识别库摆在眼前:AprilTag。(OpenCV中集成了类似的库,似乎叫做ARTag,没研究过)
AprilTag诞生于2011年的一篇论文,2016年出了AprilTag2,但是16年的论文感觉没讲啥,再加上看的cpp代码是2013年的,于是这篇博客就对着2013版本来讲好了,我们开始吧。
上一篇博客是《基于最小二乘法的椭圆拟合》,这篇博客介绍另外一种方法。由于现在正处在人生的特(工)殊(作)时(太)刻(忙),所以没怎么写,主要还是贴论文。
不同于最小二乘法直接拟合椭圆方程,论文中通过惯量矩,来预测角度、长轴、短轴,结合中心,来计算得到椭圆参数。实际工程实践中采用游程编码表示区域,该方法亦是Halcon中计算区域等效椭圆的方法,详看论文,谢谢。
这篇文章是 least-squares fitting of circles and ellipses 这篇paper的导读。我们如何使用最小二乘法去拟合圆和椭圆呢,当我们用“代数方程”来表示圆时,我们最小化这个目标函数的实际意义是什么呢?我们按照这个方程得到的结果却不一定是合适的。我们实际上想要的是实际中每个点,到该曲线上的距离最小。
于是,我们按照一个“几何方程”来进行构造。这个几何方程描述的优化方向是,每个点到曲线的距离最小。我们使用雅可比矩阵QR分解来解算圆的参数,对于椭圆参数,存在更多情况,看Paper吧:
工作之后时间越来越少,也在思考繁忙之下自己是否仍对技术拥有热情。答案是肯定的,并且,身处这个行业,也是需要不断学习的,积少成多,滴水穿石。之前写博客,或多或少想分享些有用的东西,现在环境的改变已经使得这些越发困难了,但是仍可以通过博客记录自己学习和成长的脚步。以下是来自繁忙生活中一份简简单单的笔记:
Jacobian矩阵包含了我们需要计算输出和输入的所有偏导数,这样的矩阵被称为Jacobian矩阵。
或许我们只对其中的二阶导数感兴趣,或许因为高阶导数计算量过大,所以我们使用Hessian矩阵,该矩阵包含了一个函数的所有二阶导数。

图像配准的方法大致分为三类,一类是基于灰度和模板的,这类方法直接采用相关运算等方式计算相关值来寻求最佳匹配位置,方法简单较为死板,一般效果不会太好。第二类是基于特征的匹配方法,如sift、surf点特征,或者向量特征等等,适应性较强。第三类是基于域变换的方法,采用相位相关(傅里叶-梅林变换)或者沃尔什变换、小波等方法,在新的域下进行配准。
我之前的博客介绍过傅里叶-梅林变换进行图像配准,其实也就是基于相位相关的原理,结合对数-极坐标变换进行图像配准,并给出了源码。这篇博客是对以上三类方法的小总结,无源码,都是废话,见谅。

Piotr Dollar在行人检测方面有着深入的研究,尤其是在深度学习兴起以前,其对Adaboost的研究优化和改进令人瞩目,其目标检测工具箱Piotr Dollar’s Toolbox被广泛使用。在使用该工具箱的过程中,我们通常需要手动勾选正样本,不得不承认,在监督学习的过程中,标注样本是重要,且费时费力的重复体力劳动,提高标注的效率至关重要。
博主在这篇博客中,释出一份配合该工具箱使用的GUI程序,帮助勾选样本,进行标注。
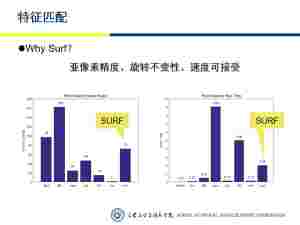
除了我们熟知的SIFT、SURF、ORB等特征点提取算法,OpenCV中还提供了十余种特征点提取算法。最近在整理以往的ppt和报告,看到其中一页ppt,发现已经忘得差不多了,就再写篇博客复习下好了,这篇博客注重对比,技术方面的内容不会太过细致,希望能有帮助。当然,文章末尾会提供这些算法OpenCV调用的实例代码。
首先,引发内容的就是下面这张ppt:(不要注意Why Surf了,当时根据具体应用场景所做的选择)左边一栏是特征点的数目,右边一栏是检测的速度,数据是在博主自己的测试集(大概四五百张图片)上测试的。
gif动画易于制作,相对于视频更小,更易于传播。作为一个程序猿,在使用程序绘图过程中想生成gif动画,可以使用MATLAB生成。当然,MATLAB生成gif动画存在局限性,专业的PhotoShop可以满足你的需要,这篇博客将专门介绍gif动画的制作。
图像配准方法主要分为三类:一种是灰度方法信息方法,另一种是基于特征的方法,可细分为特征点、直线段、边缘轮廓、特征结构以及矩不变统计特征等,还有一种就是基于变换域的方法,如相位相关、Walsh Transform等方法。傅里叶-梅林变换就是一种变换域的方法。
在图像配准过程中,常常需要处理平移、旋转、尺度变换、遮挡、形变等问题,使用傅里叶-梅林变换可以很好的应对平移、平面内旋转、缩放和遮挡,是一种鲁棒性较强的方法。这篇博客讲详细介绍傅里叶-梅林变换的性质,以及其在图像配准过程中的应用。
 在立体视觉中,常常用到Census变换,Census变换是一种非参数局部变换,其将周围像素的强度映射到一个比特穿,从而捕获图像的结构。同时使用Census变换可以减少由相机增益和偏置引起变化的影响。在立体匹配过程中,将图像做Census变换后,计算像素点之间的明式距离进行匹配,可以得到较好的效果。
在立体视觉中,常常用到Census变换,Census变换是一种非参数局部变换,其将周围像素的强度映射到一个比特穿,从而捕获图像的结构。同时使用Census变换可以减少由相机增益和偏置引起变化的影响。在立体匹配过程中,将图像做Census变换后,计算像素点之间的明式距离进行匹配,可以得到较好的效果。
这篇博客主要介绍介绍实现Census变换,由于使用OpenCV的容器和接口,所以直接使用OpenCV调用比较方便。
使用Matlab处理图像的时候,如果需要将文字或者图形嵌入图像中,就需要用到vision工具集了,如果嵌入的是文字,那么就要使用vision.TextInserter,这个在新版本的Matlab中提供了insertText函数,与其功能差不多,不过vision.TextInserter要强大一些,insertText可以修改文字背景色块但是不能修改字体。
 这篇博客介绍博主事先的CSEO超像素分割方法,CSEO法是目前已知最快的超像素分割算法,可以在640*480*3大小的图像上达到38ms的速度(使用单核CPU@2.5GHz),并且分割区域数与时间无关,是目前超像素分割领域的state-of-art。
这篇博客介绍博主事先的CSEO超像素分割方法,CSEO法是目前已知最快的超像素分割算法,可以在640*480*3大小的图像上达到38ms的速度(使用单核CPU@2.5GHz),并且分割区域数与时间无关,是目前超像素分割领域的state-of-art。
OpenCV内封装了主流的SLIC算法,当然,无法实时。这篇博客由于客观原因不提供源码、原理解释,只提供一些论文索引和博主的实验结果,仅供研究者参考。
博主使用Kinect摄像头采集图像数据,将采集的四通道数据转换为三通道数据,然后缩放至920*540(原图为1080p),采集图像和超像素分割在同一个线程中,最终速度为48ms,如果使用640*480,将算法部分从主线程中分离出来,达到论文中所说的38ms是可能的。
