前面一篇博客介绍了事件相机的原理和种类,这一篇博客来介绍一下事件相机的具体应用场景,主要也是对 Event Camera Survey的总结梳理。目前学界研究比较多的是 SLAM、Motion Object Detection、Deblur、HDR、高帧率视频等方向。传统方法在SLAM上使用较多,提取事件特征非常繁琐耗费算力,NN方面在处理事件上有一些探索,但都还没完全成熟。目前主要的产品应用还是手机Deblur、插帧和HDR上(目前只有手机的出货量有机会压低Event Camera的成本)。
一、传统方法
1. 基于Tracking的方法做三维重建
Kim et al., Simultaneous Mosaicing and Tracking with an Event Camera, BMVC’14

Gallego et al., Event-based 6-DOF Camera Tracking from Photometric Depth Maps, T-PAMI, 2018. PDF Video
Bryner et al., Event-based, Direct Camera Tracking from a Photometric Depth Map, ICRA’19. PDF Video
Kim et al., Real-Time 3D Reconstruction and 6-DoF Tracking with an Event Camera, ECCV’16
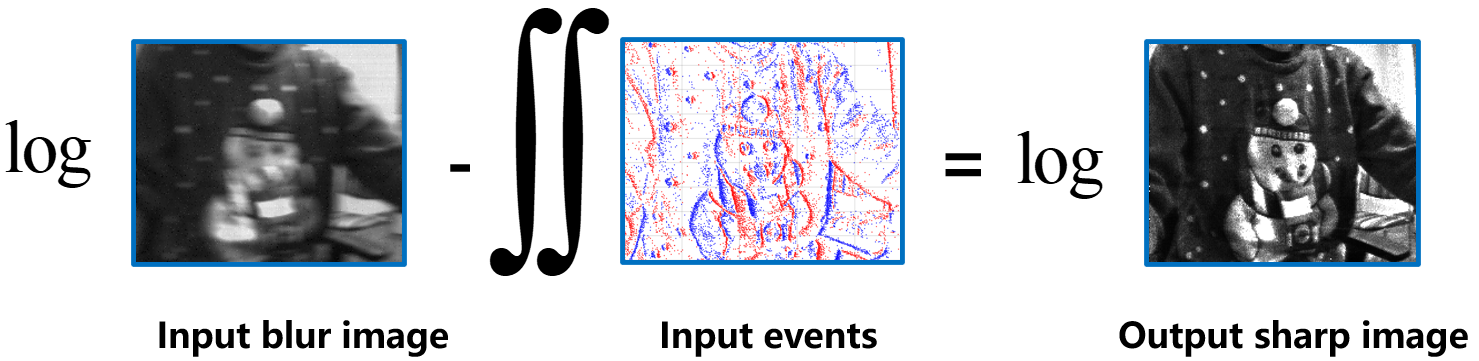
2. 结合传统图像实现高帧率,或者去运动模糊
Brandli et al. A 240×180 130dB 3us latency global shutter spatiotemporal vision sensor. IEEE JSSC, 2014
Pan et al., Bringing a Blurry Frame Alive at High Frame-Rate with an Event Camera, CVPR’19
3. 结合传统图像,实现高速跟踪
Gehrig et al., EKLT: Asynchronous, Photometric Feature Tracking using Events and Frames, IJCV 2019.
Angelopoulos et al., “Event Based, Near-Eye Gaze Tracking Beyond 10,000Hz”, Arxiv20. PDF
Xu et al., “EventCap: Monocular 3D Capture of High-Speed Human Motions using an Event Camera”, CVPR20. PDF
Calabreset al., “DHP19: Dynamic Vision Sensor 3D Human Pose Dataset”, CVPRW19. PDF
4. 用于图像增稳
Gallego et al., Accurate Angular Velocity Estimation with an Event Camera, IEEE RAL’16. PDF. Video.
5. 已知运动轨迹情况下做三维重建
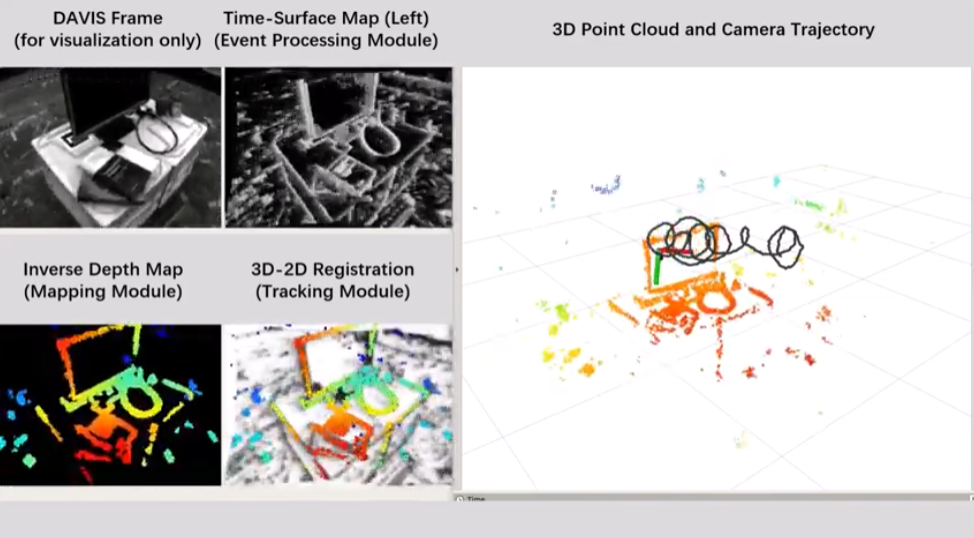
Rebecq et al., EVO: A Geometric Approach to Event-based 6-DOF Parallel Tracking and Mapping, RAL’17. PDF. Video
Rebecq et al., EMVS: Event-based Multi-View Stereo, IJCV, 2018. PDF Video Source Code
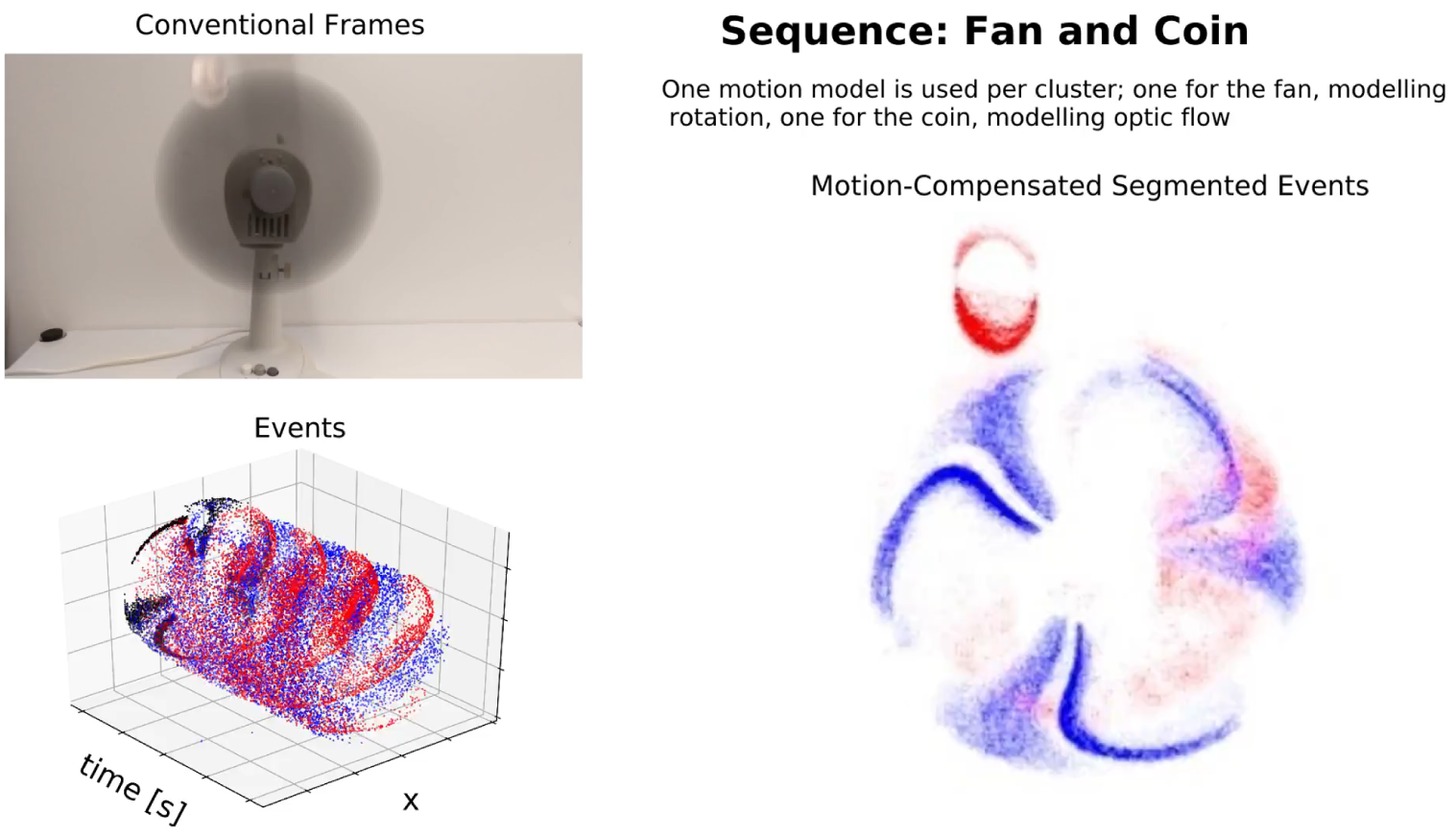
6. 运动分割
Stoffregen et al., Motion Segmentation by Motion Compensation, ICCV’19. PDF. Video.
7. 无人机躲避动态障碍物
Falanga et al., Dynamic Obstacle Avoidance for Quadrotors with Event Cameras, Science Robotics, 2020. PDF. Video
Falanga et al. How Fast is too fast? The role of perception latency in high speed sense and avoid, RAL’19. PDF. Video
8. 终极SLAM(图像+事件+IMU)
Rosinol et al., Ultimate SLAM? RAL’18 – Best RAL’18 Paper Award Honorable Mention PDF. Video. IEEE Spectrum.
Mueggler et al., Continuous-Time Visual-Inertial Odometry for Event Cameras, TRO’18. PDF
Rosinol et al., Ultimate SLAM? RAL’18 – Best RAL’18 Paper Award Honorable Mention PDF. Video. IEEE Spectrum.
Mueggler et al., Continuous-Time Visual-Inertial Odometry for Event Cameras, TRO’18. PDF

9. 双目DVS做SLAM
Yi Zhou, Guillermo Gallego, Shaojie Shen, “Event-based Stereo Visual Odometry,” IEEE Transactions on Robotics, vol. 37, no. 5, pp. 1433-1450, Oct. 2021.
二、基于学习的方法
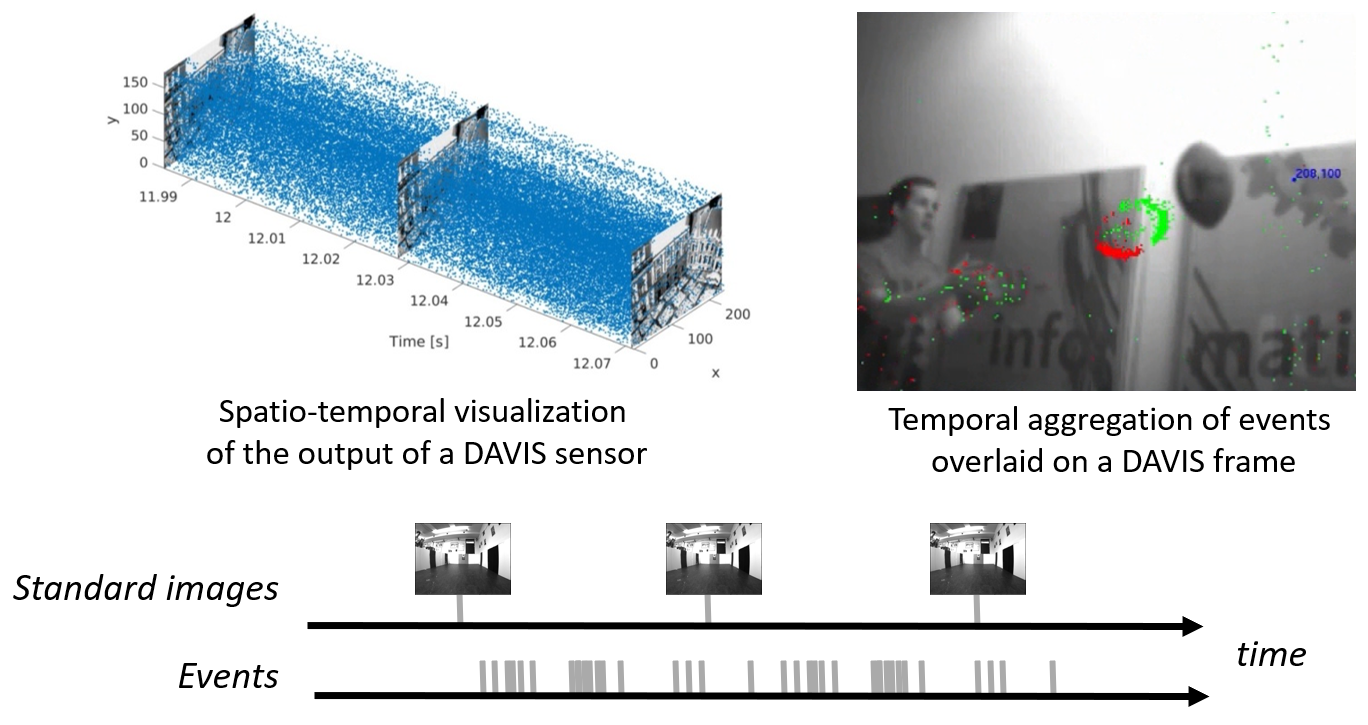
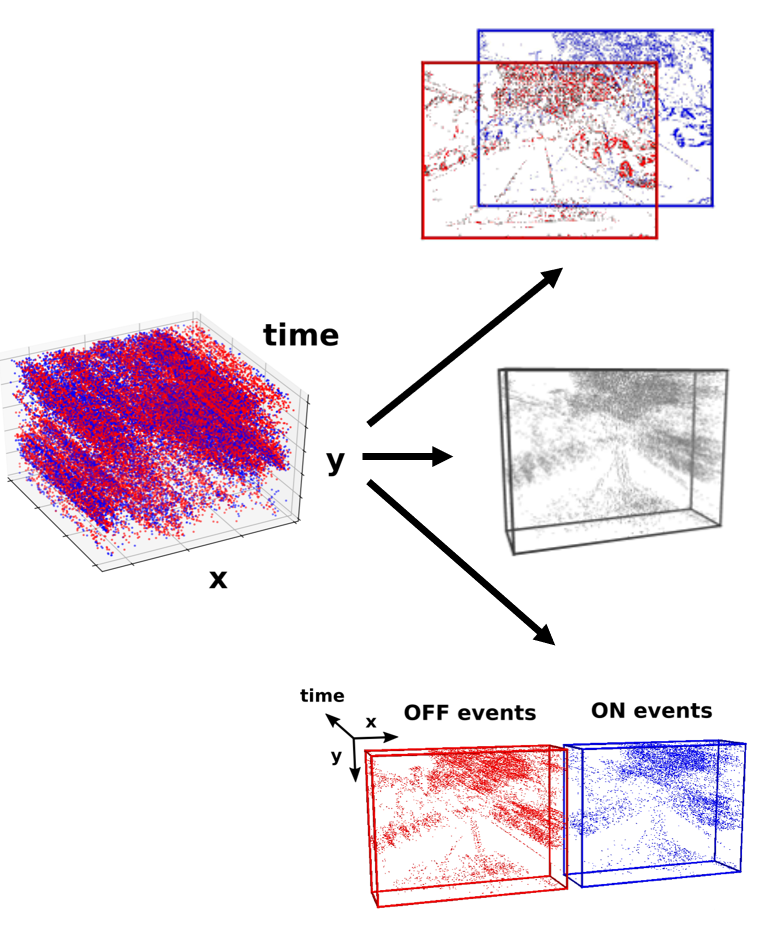
1. 输入表示
忽略时域信息,将正负事件分通道表示
忽略极性信息,将事件表示为三维体素
保留极性信息,以四维方式保存事件信息
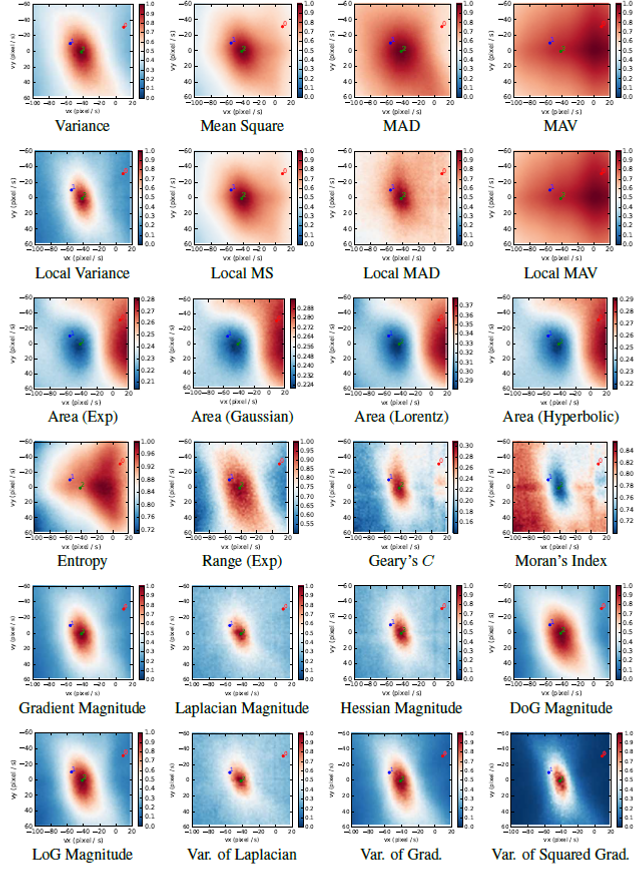
2. Loss Function
Gallego et al., Focus Is All You Need: Loss Functions for Event-based Vision, CVPR19, PDF.
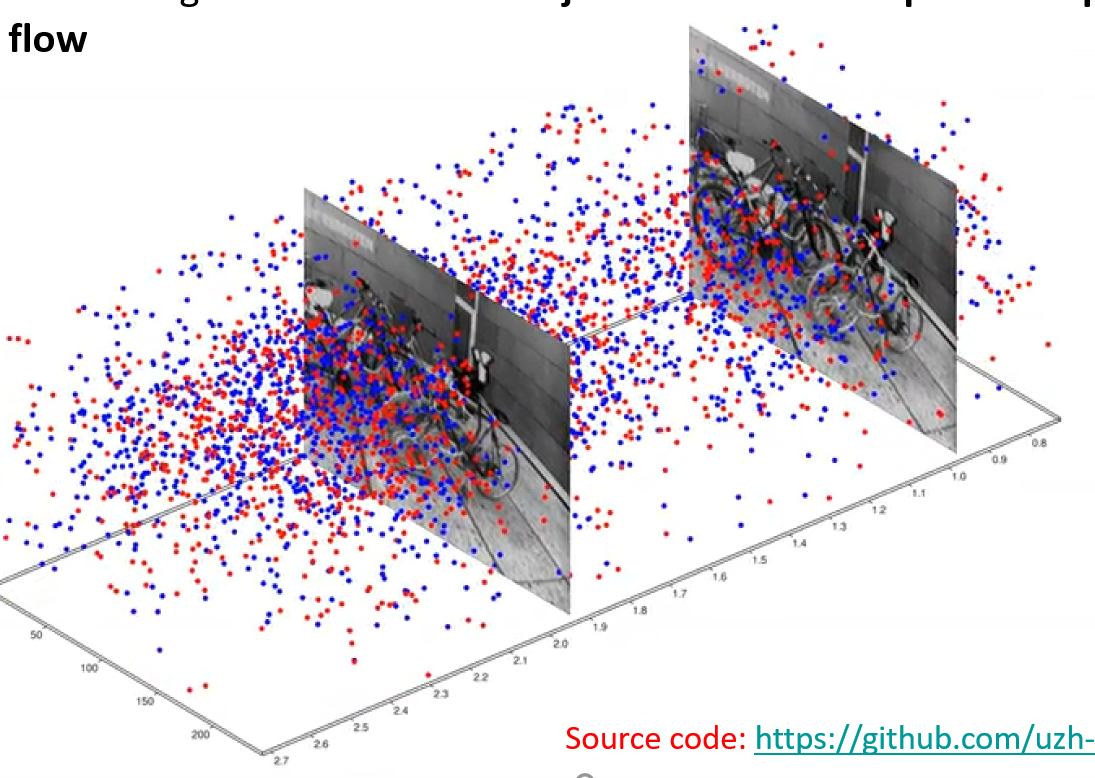
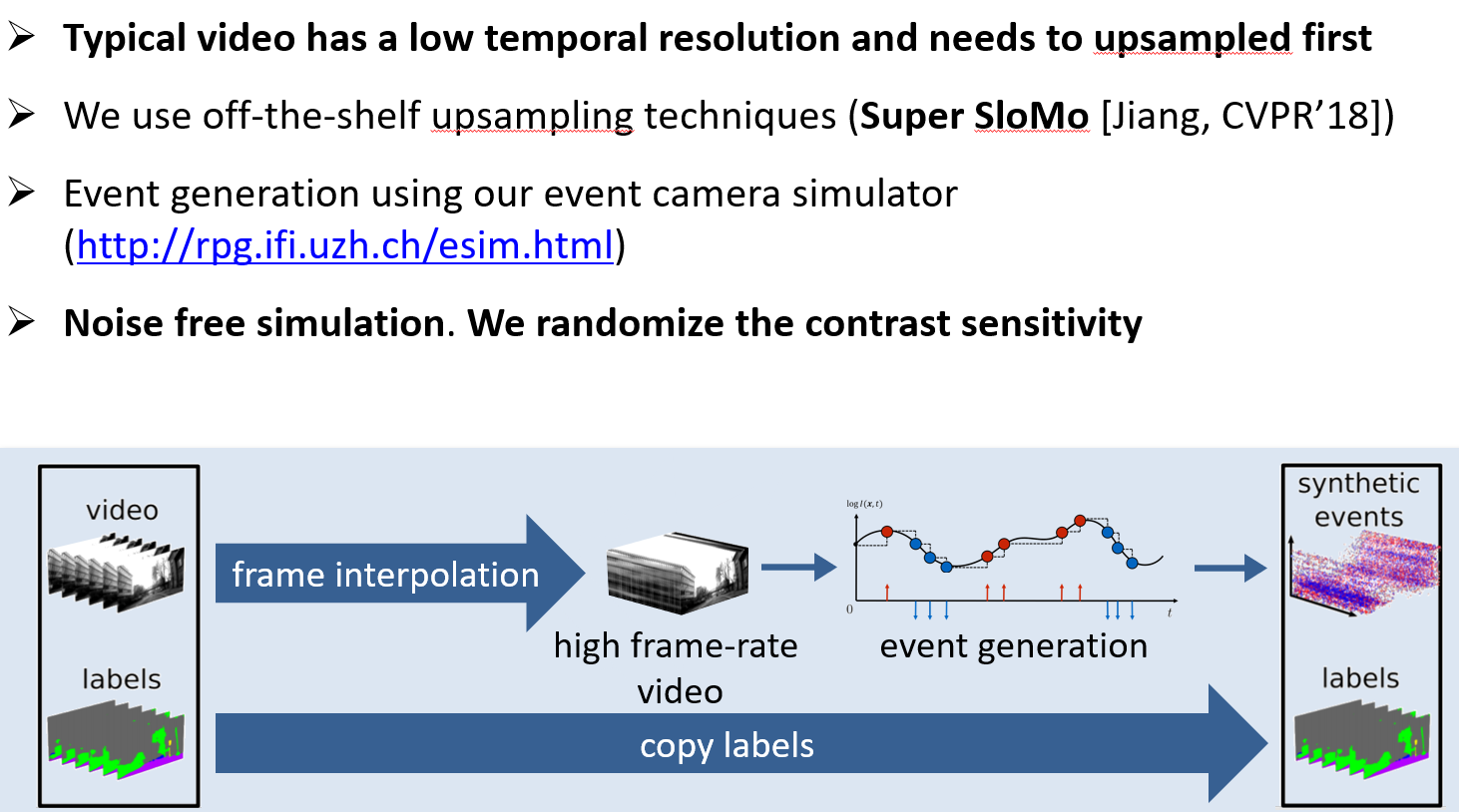
3. 数据产生
事件相机缺乏大规模数据集,除了一些comment的dataset,也可以把视频序列转化为事件数据。
Gehrig et al., “Video to Events: Recycling Video Datasets for Event Cameras”, CVPR20. PDF Video Code.

4. 网络结构
稀疏卷积网络
事件来临时不需要更新整个网络,只更新该事件的激活部分,
Messikommer et al., “Event-based Asynchronous Sparse Convolutional Networks”, ECCV’20. PDF Video.
脉冲神经网络(SNN)
Gehrig et al., “Event-Based Angular Velocity Regression with Spiking Networks”, ICRA20 PDF
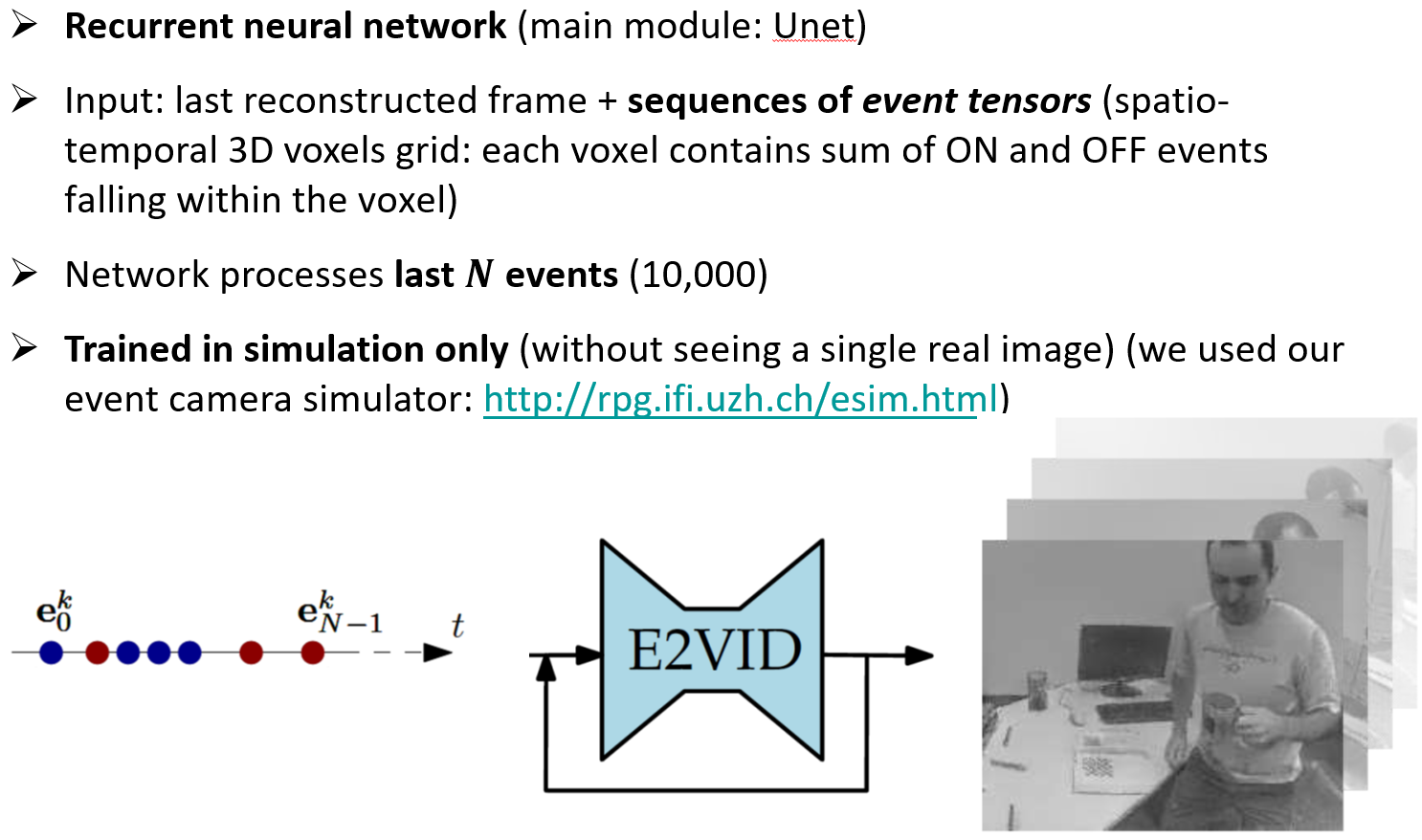
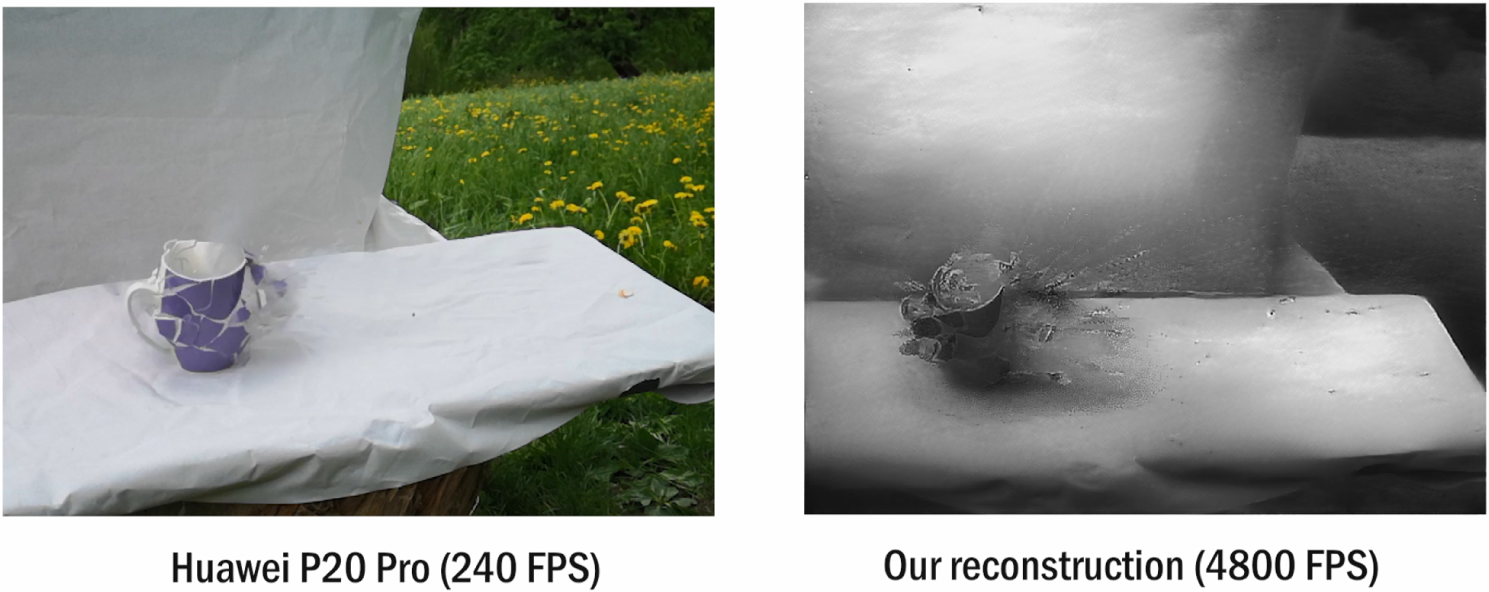
5. Event2Video,基于事件相机做高帧率视频重建
在高帧率视频基础上做Video HDR、高帧率、深度估计和目标识别等
Rebecq et al., “Events-to-Video: Bringing Modern Computer Vision to Event Cameras”, CVPR19. PDF Video.
Rebecq et al., “High Speed and High Dynamic Range Video with an Event Camera”, PAMI, 2019. PDF Video Code

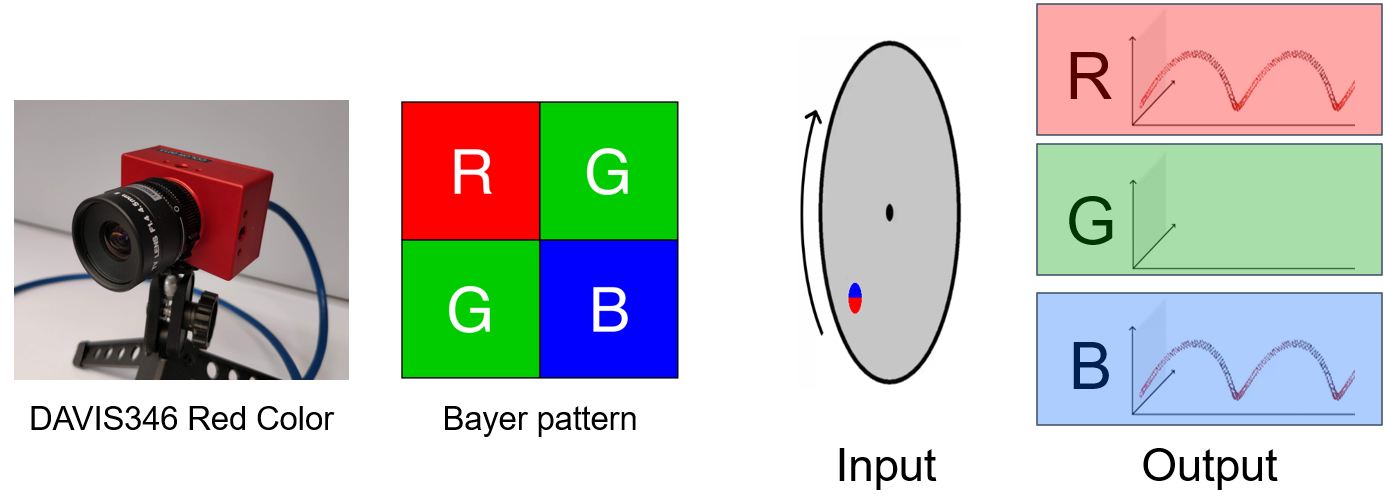
也可以用彩色事件相机重建图像色彩
Taverni et al., Front and back illuminated Dynamic and Active Pixel Vision Sensors comparison, TCS’18
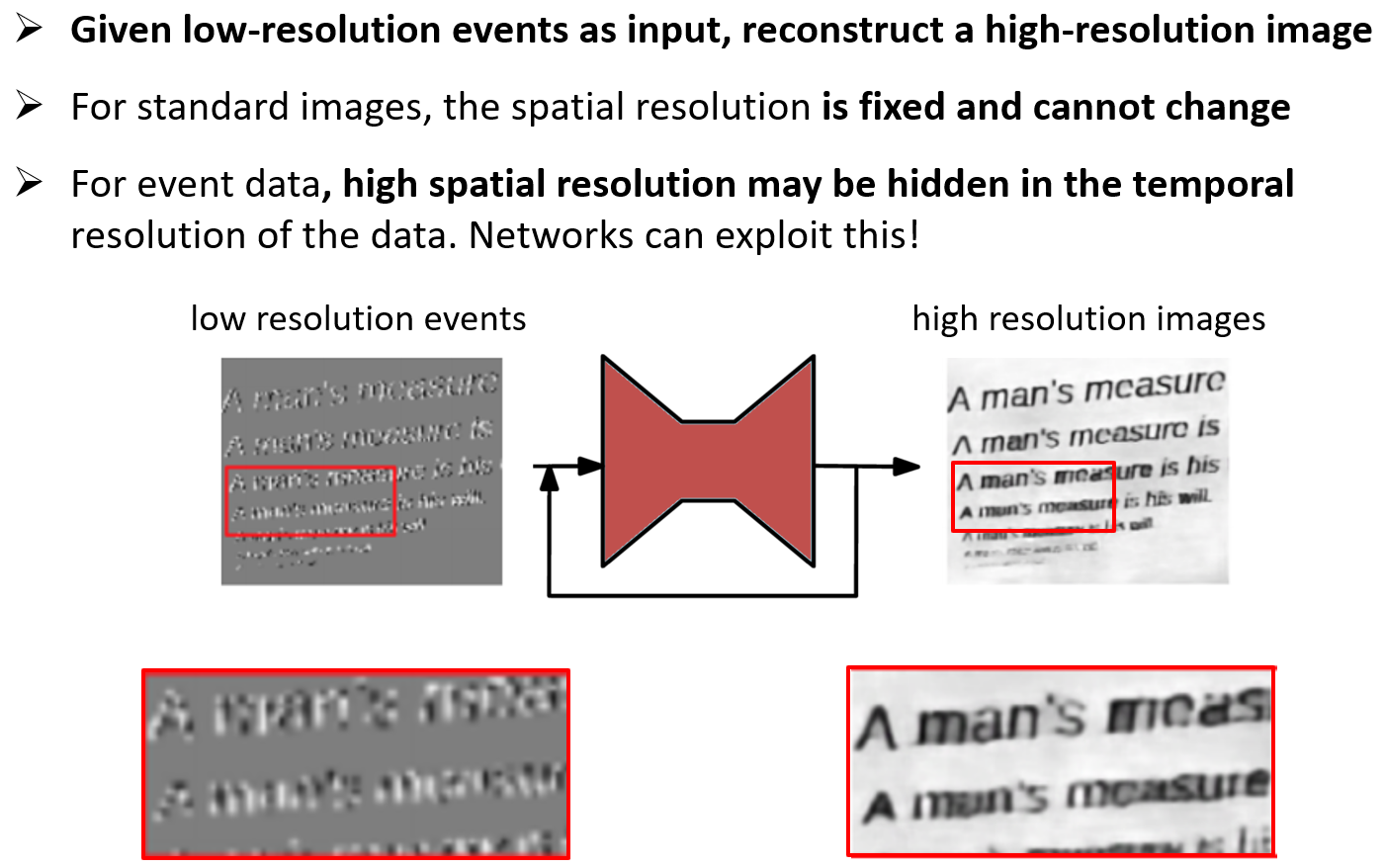
6. 计算摄影
超分辨率问题:
Mostafavi I. et al. , “Learning to Super Resolve Intensity Images from Events”, CVPR20
Wang et al. “EventSR: From Events to Image Reconstruction, Restoration, and Super-Resolution”, CVPR20