立体视觉,版权声明,资源来自百度文库。
立体视觉是计算机视觉重要的分支,立体视觉的主要任务是通过二维图像恢复三维环境,是一项困难的逆向工程。博主很久之前看到过这份ppt,感觉非常nice也非常全面,Post上来以供分享学习。
a blog driven by interest~
时隔一年,再次回归目标跟踪领域,图像跟踪系列博客继续更新。目标跟踪领域在2017年发生了许多大事件,新老牛人提出了多个有趣的算法,这些在VOT2017中都有体现。这篇博客介绍的CFWCR算法取得了VOT2017比赛的第二名,CFWCR正是以MD大神的ECO(我之前的博客介绍过该算法)为Baseline的(CFWCR作者表示复现不了ECO的效果,这就很尴尬了),于是CFWCR的效果出来之后,就成为CF派系的重量级算法。
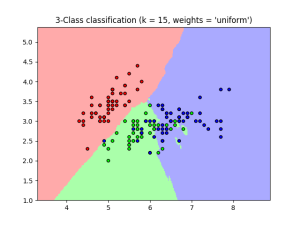
上一篇博客我们完成了一个六行的SVM,对python中数据和估计器等概念有了认识,这篇博客将更加详细的对sklearn的训练进行解释,同时也按照官网例程运行KNN和SVM等具有代表性的demo。
这节笔记对应的官网教程为: Statistical learning: the setting and the estimator object in scikit-learn 和 Supervised learning: predicting an output variable from high-dimensional observations
在上一篇博客我们搭起了环境,这篇博客将以最简介的代码快速上手sklearn。
这节笔记摘自官网Quick-Start的教程:An introduction to machine learning with scikit-learn。比起官网教程,这篇博客首先会概述基础概念,帮助快速理解和上手。话不多说,开始吧。
Scikit-learn在机器学习领域已经无人不晓了,如此给力的工具应该早点接触到的。sk-learn既不支持深度学习,也不支持GPU加速,sk-learn是专门用来搞定传统机器学习的,这一点要给深度学习玩家提醒下。这篇博客主要讲Python环境的搭建,博主使用的是pycharm+anaconda,pycharm是python的IDE,支持断点调试和工作区变量查看,anaconda用来解决各种包的依赖关系,scikit-learn已经集成在其中了,安装之后检查包的更新就可以了。
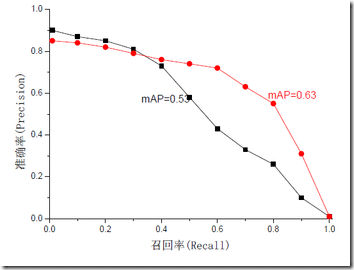 在信息检索、分类体系中,有一系列的指标,在学术研究和工程应用上经常出现。以上名词的中文名分别是:准确率、找回率、F1、平均正确率、ROC、AUC(ROC曲线下的面积)。
在信息检索、分类体系中,有一系列的指标,在学术研究和工程应用上经常出现。以上名词的中文名分别是:准确率、找回率、F1、平均正确率、ROC、AUC(ROC曲线下的面积)。
在信息检索中,常用Precision、Recall、F1、mAP指标进行评价系统性能,左图就是一份可以计算mAP的曲线图。
在分类和识别中,常用ROC和AUC来衡量体系性能,这也和我们常常认识的正例分对,错例分错相对应。这些指标常常在论文中出现,了解这些指标非常重要。下面的博客将详细介绍这些指标。
TensorFlow的基本数据单元是tensor(张量),如何讲tensor的值取出,又如何在运算过程中向tensor中传入值呢?Fetch与Feed是TensorFlow中关于数据存取的术语,博主就由代码来简要介绍下Fetch与Feed。
TensorFlow使用图来表示计算任务,图中的节点被称之为op(operation的缩写)。TensorFlow程序通常被组织成一个构建阶段,和一个执行阶段。在构建阶段,op的执行步骤被描述成一个图。在执行阶段,使用会话执行图中的op(op就是节点)。简单的说,先给出描述,只在run()方法中执行操作。
SyntaxNet由TensorFlow实现,本月Google正式开源了这一框架(GitHub),关于这一框架,我们可以参考相关论文。在准备完NPL的基础知识后,博主将在这篇博客介绍这篇论文:Global Normalized Transition-Based Neural Network。该架构的资料还来自谷歌研究博客。
在机器学习中,有两个很重要的概念,bias and variance,根据学习曲线判断当前的状态是high bias还是high variance来调整机器学习中的参数,以达到理想的效果。多年前学习斯坦福机器学习教程时对这两个概念的影响尤为深刻,鉴于这两个概念又是如此重要,特此整理。