立体视觉是计算机视觉中最为重要的方向之一,在视差检测方面KITTI、MiddleBury提供的数据集常被作为Benchmark。
一、重要的立体视觉BenchMark
MiddleBury计算机视觉网站 http://vision.middlebury.edu/
CVLIBS计算机视觉网站 http://www.cvlibs.net/
二、MiddleBury双目BenchMark
1.数据集
最新的数据集是2014年发布的,也是该系列数据的第三版,分为训练集和测试集,训练集有15对双目图像,并提供groundtrues(GT),还有30对测试集
2.SDK
为了数据可视化和提交结果的需要,该网站还提供了一些SDK,SDK的使用比较简单,看Readme即可,使用Readme中的demo可以很清楚的知道,我们应该如何使用MiddleBury
编译好的sdk(如何编译就不讲了,缺什么就装什么,直接sudo apt-get install XXXX)提供了很多工具,大多都是视差图格式转换的
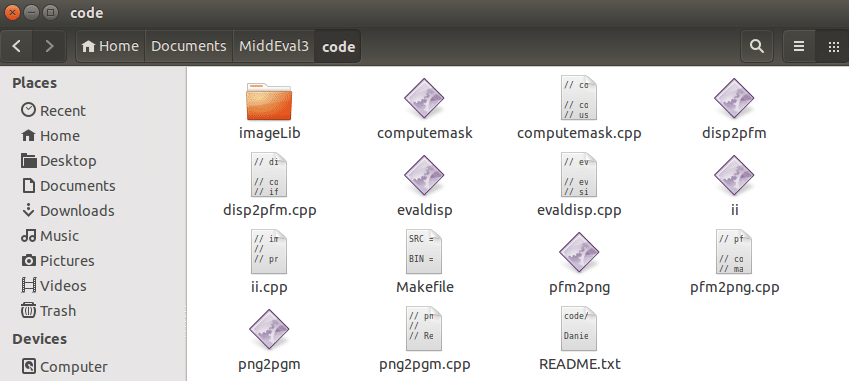
这些工具都可以在readme中找到使用说明
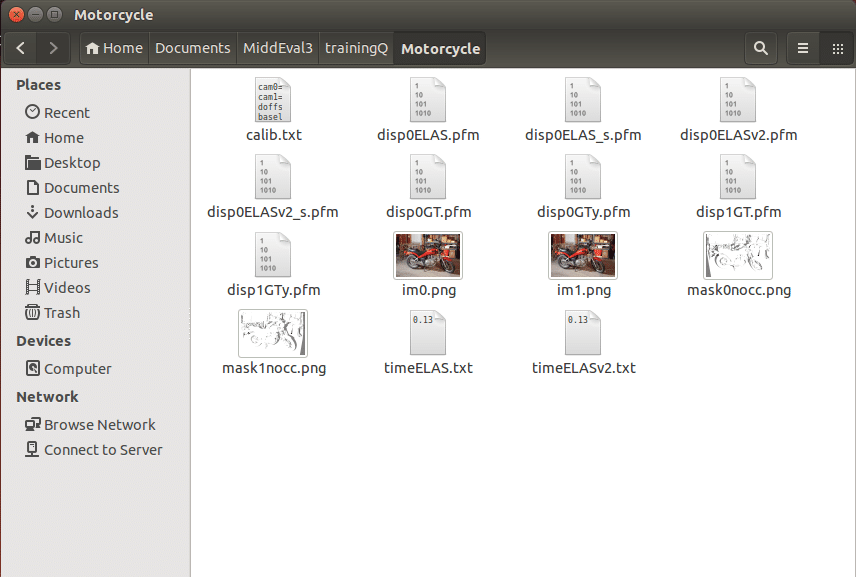
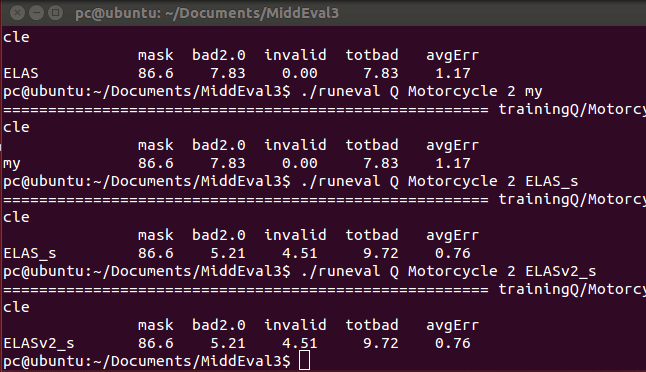
算法生成的文件disp0myalg.pfm、timemyalg.tx中,myalg替换成自己的算法,然后使用runeval 就可以得到评价结果了,runeval是根据myalg后缀名来进行判断的,具体参见demo的readme
至于其中的pfm文件,这是一种非正式的浮点图片格式,我的另一篇博客写有Matlab读写pfm格式文件的方法,当然,你也可以使用官方提供的sdk或者cvkit工具来转换。
cvkit安装好之后,bin文件夹中有imgcmd.exe,用命令行可以把png灰度图转化为pgm格式图像,再用sdk中编译好的工具或者我另一篇博客中写的Matlab工具转化为pfm格式,然后导入就可以了(opencv是支持pgm格式的哦,可以直接写成pgm,然后再转pfm)
三、工具使用
———————————————————————————————-
留个坑,以后长期更新
《立体视觉BenchMark——Middlebury》有1条评论