目标识别的评价指标主要有ROC曲线,missrate(MR,其实就是FALSE Positive)、FPPI、FPPW等。单图像跟踪的评价指标主要有两个,一个是pixel error,一般是算中心距离,另一个是overlap rate,区域重叠率,用重叠区域除以两个矩形所占的总面积Aoverlap /(A1+A2-Aoverlap),常常用pixel error绘制帧误差曲线,用重叠率绘制误差曲线。除此之外,还有针对多目标图像跟踪的评价指标。在VOT中,目标跟踪的评价指标又多了EOA和EOF图,这篇博客都会介绍。
更新:点击查看更详细的目标跟踪介绍-VOT2016Benckmark
OTB
Online Object Tracking Benckmark,其中主要使用两类评价指标,一类是平均像素误差Average Pixel Error(APE),二类是平均重叠率Average Overlap Rate(AOR)
平均像素误差
顾名思义,平均像素误差就是根据预测目标中心位置与真实位置的像素距离作为误差值,该值越大,说明误差越大。最终结果区帧平均。
平均重叠率
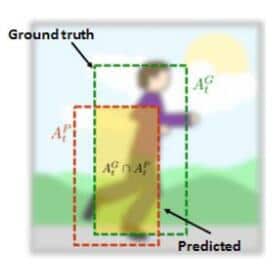
下面这张图应该可以说明问题,平均重叠率$latex O$是以面积来衡量的[mathjax]
$$O = \frac{A_t \bigcap A_{gt}}{A_t \bigcup A_{gt}}$$
时间鲁棒性
像素误差和重叠率都可以做成成功率图(Success Plot),这个大家在Paper里都已经见过了,还有一种成功率图,就是鲁棒性成功率图,又分为时间鲁棒性(TRE)和空间鲁棒性(SRE),吐过不测试鲁棒性,那么就叫做一遍成功率(OPE)
OTB对时间鲁棒性的测试是通过将视频序列在时间轴上平均找出20个点作为起点,终点还是原来的最后一帧,这样通过对20段视频序列运行算法,绘制平均的重叠率图或者像素误差图,这样就完成了空间鲁棒性的测试。
空间鲁棒性
与时间鲁棒性一样,一段视频在第一帧,以真实位置稍作偏移,就是说测试初始化位置有偏差的目标序列。这样测试十二段(八个方向,四个尺度),具体方法参照OTB-2013的Paper。这样十二段序列的评价成功率曲线,就是鲁棒性的曲线
VOT
VOT自2013年发展到现在,评价体系比较成熟,也越来越受欢迎。其中主要有EAO指标和EFO指标
EOA标准
EAO是Expect Average Overlaprate的缩写
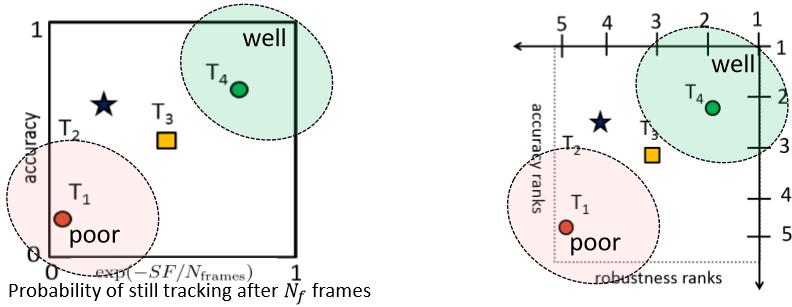
顾名思义的,精度的衡量方式是平均重叠率
鲁棒性使用跟踪算法跟丢目标的次数来衡量
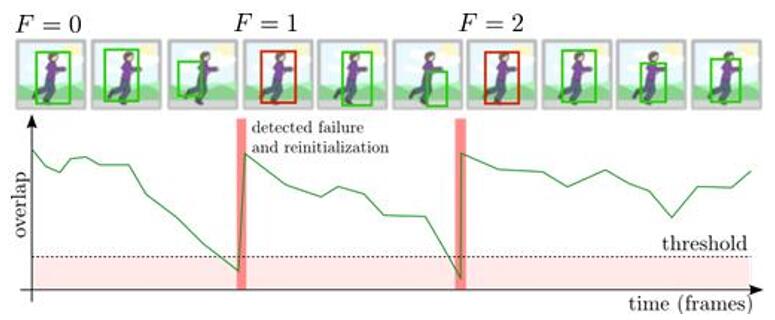
通过一种方式,在一张图中同时反映精度和鲁棒性,这就是EOA图
EFO
Equivalent Filter Operations
EFO是用来衡量速度的指标,以往我们谈速度,都需要谈硬件,再说fps,但是通过EFO指标可以减少硬件差异带来的影响。
首先测试该机器在600×600图像上,对每个像素进行30×30滤波的时间。
然后将跟踪算法耗时除以该机器上进行以上滤波操作的时间,这样得到的值就是EFO值,最大程度的减少了硬件的影响。