光有如下基本性质:强度、波长、相位、位置、传播方向、偏振等量子态。传统相机可以利用光学系统利用透明成像原理,捕捉光的位置和强度,加上带不同波长pattern的CFA,就可以用来捕捉颜色。但是传统光学系统,只能捕捉像平面上光源的位置和强度,无法捕捉光的传播方向。
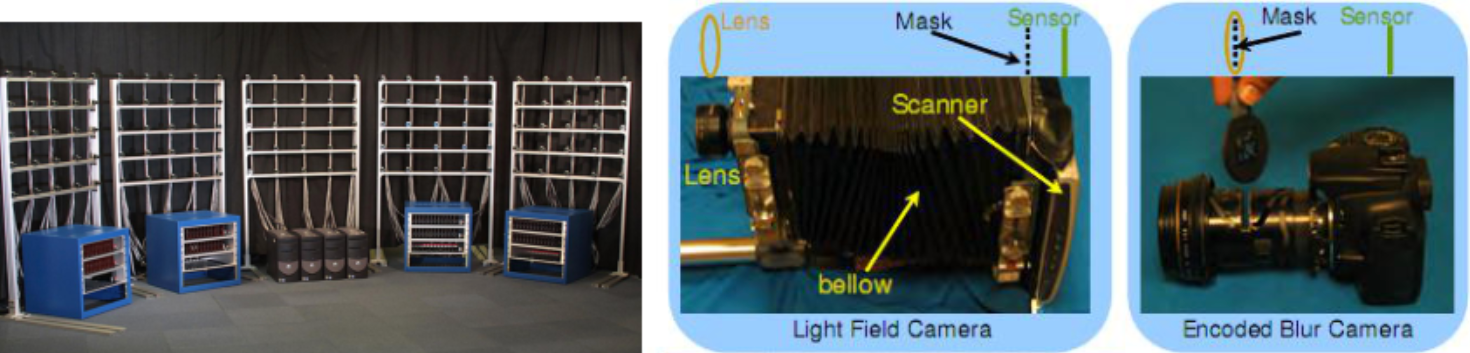
我们所描述的光场,包含光的位置和传播方向,目前我们可以通过如下手段获取光场:微透镜阵列、相机阵列、掩膜等。光场相机目前是利用微透镜阵列来捕捉光场信息。这篇博客主要介绍光场相机的原理和发展。
光场相机通过二维的探测器像面同时记录光场的四维信息,即二维位置和二维传播方向。
一、光场相机的组成
光场相机包括一个主镜头、一个微透镜阵列和一个数字图像传感器。
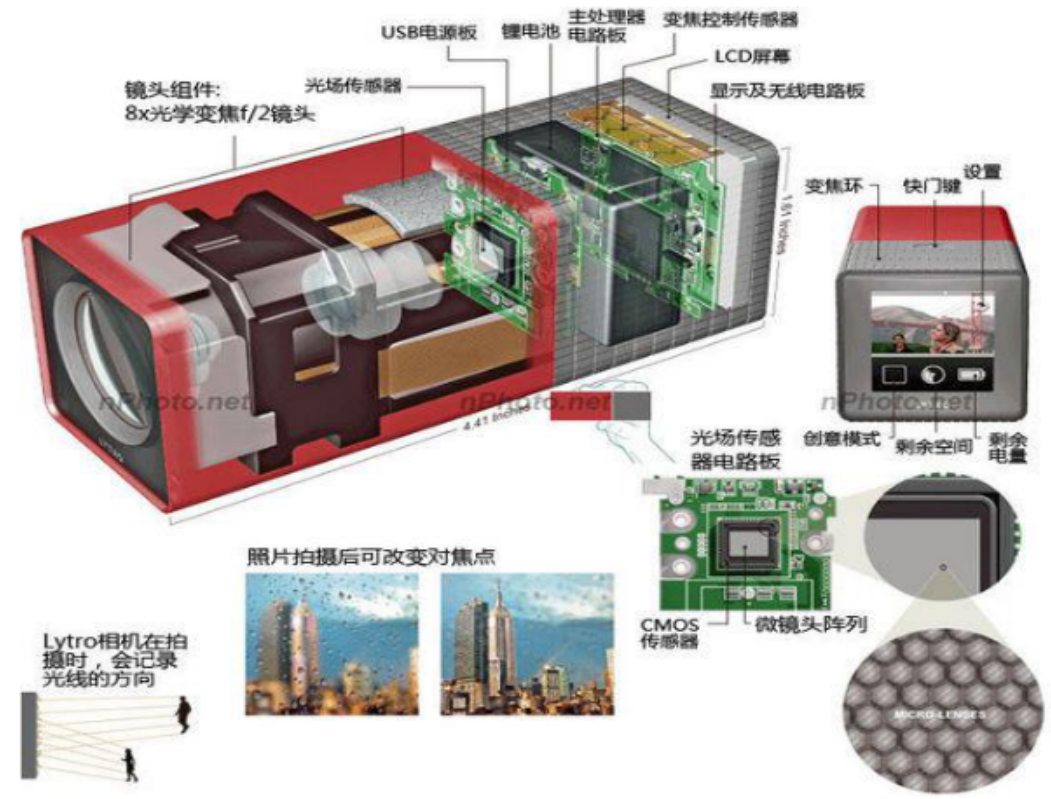
传统相机在成像过程中,需要成像的景物和传感器在一对共轭的成像平面上,以保证成像清晰。而光场相机和传统相机不同,微透镜阵列放置在镜头的焦平面附近,而传感器放置在微透镜的焦平面附近。在微透镜阵列平面捕捉到二维的位置信息,在微透镜的焦平面附近补充道传播方向信息,这样的光学系统就可以用来记录四维光场。

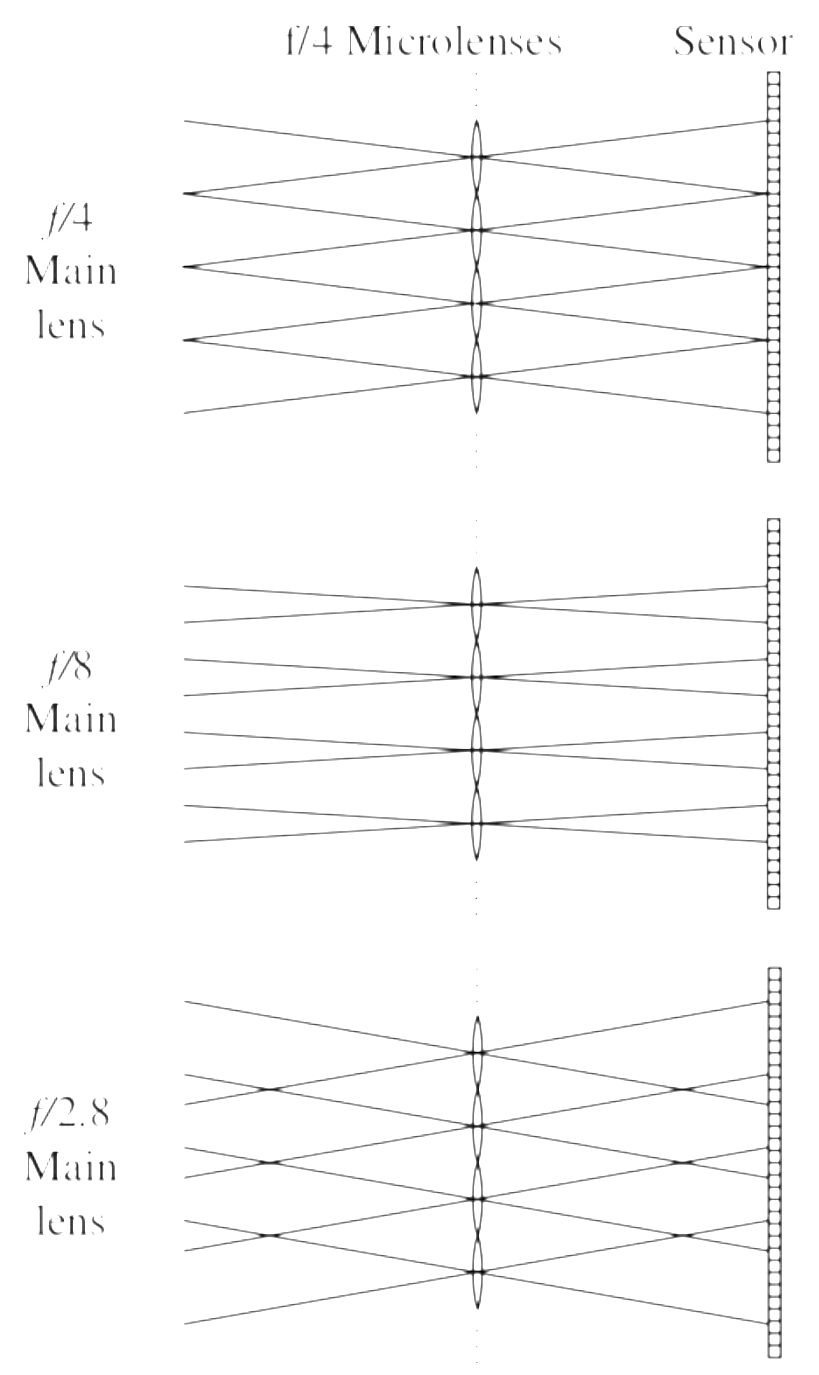
每个微透镜单元将主镜头孔径成像到探测器上形成一个宏像素,宏像素中每个像元对应主镜头孔径的一个采样(子孔径)。
二、光场记录原理
为了保证充分利用探测器上的像素,且不出现影像重叠。镜头内部结构需要满足一些特定的几何关系。