OpenCV4.0.0正式release了,其中加入了二维码识别功能,有幸博主最近开始折腾二维码识别,发现二维码的核心就是那三个定位点和辅助对齐点。ZXing和OpenCV都是通过二维码定位点的11311来进行定位的,这是利用了二维码最显著的特征。但是博主会处理一些变态的情况,比如过曝光到11311定位点无法找到(即图像中定位点的黑白间隔不是1:1:3:1:1),于是就需要通过其它方法来找定位点了。一个标志识别库摆在眼前:AprilTag。(OpenCV中集成了类似的库,似乎叫做ARTag,没研究过)
AprilTag诞生于2011年的一篇论文,2016年出了AprilTag2,但是16年的论文感觉没讲啥,再加上看的cpp代码是2013年的,于是这篇博客就对着2013版本来讲好了,我们开始吧。
一、论文、代码、概述
博主接触过的Marker识别还挺多的,用过比较好的就是随机点Marker,然后就是AprilTag这种Marker,它们都具备一定的抗遮挡能力,可以被用作视觉定位、相机标定等。AprilTag就是具有编码信息的那种。
官网:https://april.eecs.umich.edu/software/apriltag.html
AprilTag论文: url=”https://pcv.oss-cn-shanghai.aliyuncs.com/wp-content/upload/2018/11/olson2010tags.pdf“
AprilTag2论文:url=”https://pcv.oss-cn-shanghai.aliyuncs.com/wp-content/upload/2018/11/wang2016iros.pdf“
还有一篇用它来做相机标定的论文:url=”https://pcv.oss-cn-shanghai.aliyuncs.com/wp-content/upload/2018/11/richardson2013iros.pdf“
这份c++代码
AprilTag-cpp:
swatbotics / apriltags-cpp
C++ port of the AprilTags library, using OpenCV (and optionally, CGAL)
ApriTag-cpp-win: 这是博主fork上面的,稍作适配性修改,可以直接在Windows下编译,
P-Chao / apriltags-cpp-win
[Windows Version: AprilTag] C++ port of the AprilTags library, using OpenCV (and optionally, CGAL)
二、AprilTag的检测流程
2010年的那篇Paper基本描述了处理细节
1. 读入原图,做图像预处理

2. 高斯模糊图像,平滑噪声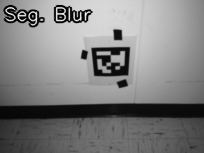
3. 计算梯度,包含梯度的方向和幅值
这里在计算得到梯度后,选取幅值M大于阈值的作为边缘点


4. 对梯度边缘进行聚类(使用并查集)
对于边缘点,搜索其周围点,根据边缘的方向,将相邻的点进行聚类,其中使用了并查集(常被用来标注连通域)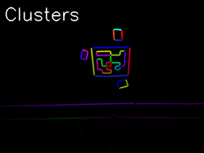
5. 采用线性回归拟合直线
这里的线性回归是带权重的,其方向与线段方向的差异影响权重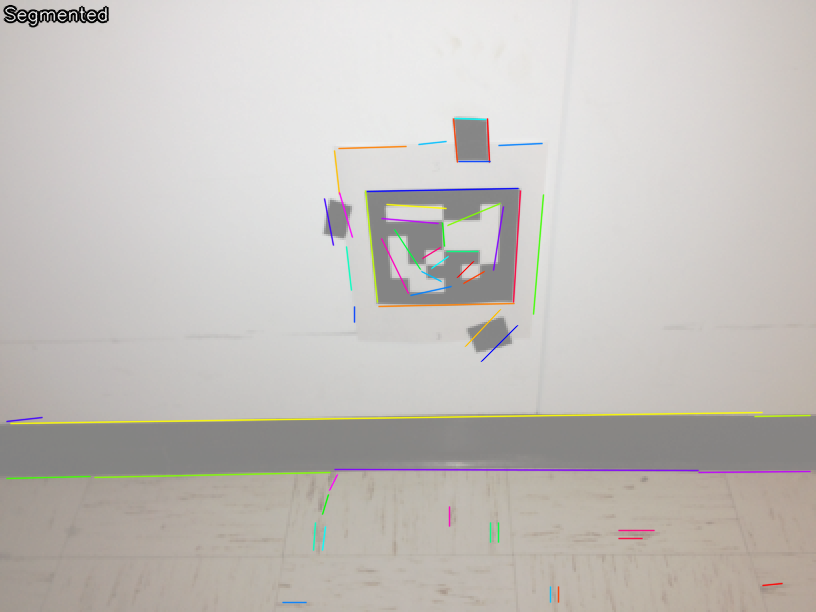
6. 寻找封闭直线组成的四边形(DFS四层)

7. 细化

三、AprilTag的解码细节
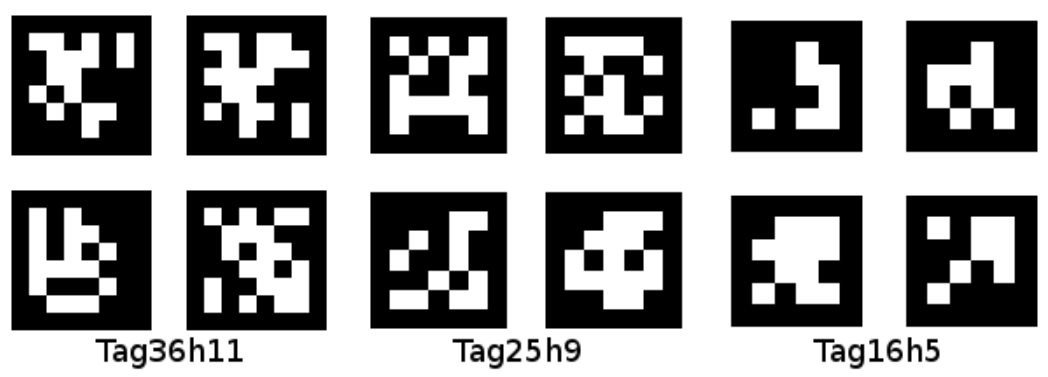
根据AprilTag设计的码型,仿射变换回正视之后,来对其进行网格采样,几种常用的码型如下,有一些码型带有校验功能,所以具备一定的抗遮挡能力
 1. 确定二值化阈值
1. 确定二值化阈值
2010年的那篇论文里面有细节。这里在对7×7的module进行采样时,最外圈是白色,外圈里面的一小圈是黑色,所以根据这两圈的采样来确定二值化阈值。对黑模块和白模块分别用二次多项式来拟合灰度分布(考虑到自然界中材质、光源等特性,反光强度常常是凸函数),对于每个位置,都将计算黑白模块应该在这里是多少阈值,就选择黑色点的灰度分布方程和白色点的灰度分布方程,算出两个灰度,选中间值作为阈值。
2. 计算单应矩阵
因为Marker是正方形,所以假定四边形都是homography之后的。
Homography
四、用于相机标定或位姿测量
主要是2013年那篇paper里面的。挖坑回填?如果有时间的话,欢迎下方留言。
非常感谢博主的分享,请问您在“检测流程”部分放上的图是您怎样实现的呢?就是用的源码吗?摄像头等硬件设备您是如何调用的呢?
我也想通过Apriltag来实现定位,非常想跟您学习一下。
网上用openmv的视觉模块,但是在单片机上怎么运行的我不会,能不能交流一下。
单片机有操作系统吗?
源码里面cmake之后有几个vs工程,参考下
我也想自己用单片机做apriltag定位,希望和大神交流,我的qq:1137945746
大神,我也想和你交流。我的qq:591791945。谢谢您!
大神,有一些问题想向你请教,我的qq644534561,谢谢。
大神,我仅仅想用Apriltag来识别tag码并得到四个角点的值,请问该怎么做呢
读一下主函数demo代码,里面有一个四边形检测,做到这一步就有四个角点位置了