旋转矩阵和欧拉角之间的正向转换关系比较好推理,而逆向变换就显得不是那么容易了。这篇博客介绍由旋转矩阵计算欧拉角的方法,参考了一篇Paper:Computing Euler angles from a rotation matrix。Paper本身介绍的还是比较清楚的,这篇博客最后附了转换计算的代码,包括文章作者提供的Matlab版本和博主提供的C/C++版本,希望能有用。
 PengChao
PengChao
Scikit-learn学习笔记(三)从高维度观测数据进行预测
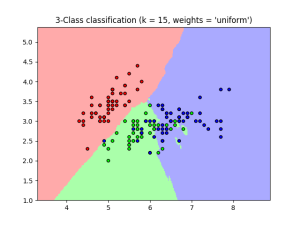
上一篇博客我们完成了一个六行的SVM,对python中数据和估计器等概念有了认识,这篇博客将更加详细的对sklearn的训练进行解释,同时也按照官网例程运行KNN和SVM等具有代表性的demo。
这节笔记对应的官网教程为: Statistical learning: the setting and the estimator object in scikit-learn 和 Supervised learning: predicting an output variable from high-dimensional observations
Scikit-learn学习笔记(二)入门例程,估计器
在上一篇博客我们搭起了环境,这篇博客将以最简介的代码快速上手sklearn。
这节笔记摘自官网Quick-Start的教程:An introduction to machine learning with scikit-learn。比起官网教程,这篇博客首先会概述基础概念,帮助快速理解和上手。话不多说,开始吧。
正则表达式基础教程
正则表达式被广泛用于字符串处理,前段时间由于网站改版,没有做好网址重定向,导致用户访问返回404,于是学了一下正则表达式(淘宝正则表达式要20块一条,好吧,于是我自己动手了)。这两天学Python,学到正则表达式的时候,发现一篇简明的正则表达式教程,虽然只是基础部分,但是记忆和理解非常方便,不由的做了下学习笔记,建议访问原网站内容进行学习。
使用python脚本更改pip包源
在国内,可以直接在C://用户名//pip//pip.ini创建并修改源,使用如下脚本可直接创建pip配置文件并进行修改。
pcl::PointCloud与pcl::PointCloud::Ptr的相互转换
pcl::PointCloud与pcl::PointCloud::Ptr的相互转换
ROS学习笔记(一)ROS环境搭建

ROS:Robot Operating System
ROS是开源的机器人次级操作系统,其设计的首要目标是在机器人研发领域提高代码复用率,是一种分布式处理框架(Nodes)。它提供类似于操作系统所提供的功能,包含硬件抽象描述、底层驱动程序管理、共用功能执行、程序间的消息传递、程序发行包管理等。
ROS提供多语言支持,利用简单的、语言无关的接口定义消息传送。ROS还利用了很多已经存在于开源项目的代码,如OpenCV中借鉴视觉算法、从OpenRAVE借鉴了规划算法等。DJI、iRobot等机器人公司都在使用ROS。
PCL实现SAC-IA点云初始配准
随机采样一致(ransac)算法是一种随机性的参数估计算法,利用Ransac可以实现采样一致性初始配准(SAC-IA)。采样一致性初始配准(SAC-IA)给出一个初始预估的刚性(Rigid)变换矩阵,为更精确的位姿估计算法(如ICP等)提供初始配准状态。
PCL点云库中封装了丰富的点云数据处理函数,利用PCL实现初始点云配准较为容易,于是博主就也实验了一下,效果还不错,就是时间耗费的问题,大概2000个点,迭代2000次,花了5s,实在是太慢了,代码托管在github,比较初级,欢迎指教。
PCL读取点云并可视化
这篇博客提供一个PCL读取点云并可视化的最简Demo,并提供扩充学习资料的链接。其中点云读取比较简单,而可视化比较复杂。
PCL的可视化类有好几号,最强大的是PCLvisualizer,这个类是这篇博客的主要内容。如果只是简单显示点云,可以不需要PCLvisualizer类,调用CloudViewer就可以了。CloudViewer的调用过程更加简单直接,PCLvisualizer更加强大,功能更加丰富。
PCLvisualizer还可以设置鼠标键盘操作回调函数,功能之多,并且开源的PCL也在不断丰富和完善,所以在调用PCLvisualizer时,大部分编程是需要参考文档手册的。
LeetCode_146: LRUCache 使用STL-list
在LeetCode的题目中,考察list操作的比较少,所以这道题也算是经典了,只有17%的通过率也足以说明问题。STL的list模板是一个环形双链表,其支持链表的基本操作,并且封装了reverse、sort、merge、splice等算法,为链表的操作提供许多遍历,这篇博客会根据在STL源码分析中的内容进行简单介绍。
将阿里云OSS挂载为ESC本地盘
原文地址:教你如何简单将OSS bucket挂载成为阿里云ECS服务器本地盘
博主在CentOS7.3环境下测试有效,也就是说对于CentOS6到最新版本都可用,Ubuntu14.04以上也可用,详见原文。
使用OSS bucket作为挂载磁盘有如下好处:1.可以节约本地磁盘空间 2.使用ftp通过esc上传文件到oss可以避免oss外网流量,节省费用 3. 将网站本身的资源直接放置在OSS,方便直接使用CDN加速,而自己网站不用通过OSS的API进行上传修改操作。
算法导论总结(五)散列表
LeetCode刷了两百多题,再来一波总结,题目刷多了很多不做笔记就忘记了,这里也算是巩固一下。这一节主要总结散列表类型的题目。散列表、桶排序等算法最大的特点就是时间复杂度是O(1)。这对于需要考虑算法时间复杂度的题目来说提升是常常需要考虑的方法。这篇博客没有太多原理的解释,都是对着题目做的随手笔记 ,比较乱,请见谅。
算法的嵌入式移植(二)DSP优化
前面一个篇章:算法的嵌入式移植(一)C代码优化部分 侧重语言层面的优化,而更多针对DSP特性进行的优化将在本篇章进行介绍 ,内容大多是摘抄书本和网络资源,因为是整理以往的笔记,来源已经不可靠了,不过不影响其中内容的经典。
DJI校招提前批-算法工程师
2017-06-26创建:
LeetCode_210: CourseScheduleII 拓扑排序
这道题与前一版本207一样,只不过前一版本要求判断是否有环,而当前版本还要给出可行顺序,那么这个问题就自然而然的归为拓扑排序了。这篇博客将对有向图和无向图中是否存在环这一问题进行归纳,并且给出一个较为简洁的拓扑排序代码。拓扑排序,简单的说就是不断将度为0的点提取出来,提取的顺序就是拓扑排序。在算法导论中,给出了DFS和BFS解法,其中DFS采用完成时间倒序作为拓扑排序,我们需要了解拓扑排序问题的解法是多样的,这篇博客给出的代码不算唯一的。