在p{30pt}后面加上 <{\centering} 就可以了。
 PengChao
PengChao
MTCNN进行人脸特征点检测和特征点提取

级联CNN提出与2015年,在目标检测领域有着很成功的应用。好久好久好久没看过目标检测了,今天被问到这个,临时翻论文到源码,发现还是很容易理解的。只是好久好久好久没玩Caffe,发现Caffe现在丰富了太多。这篇博客介绍的MTCNN人脸检测,就是基于Caffe平台的,与级联CNN有关,清楚所有技术细节之后,决定写一篇博客记录一下。
图像跟踪(十一)CFWCR目标跟踪算法
时隔一年,再次回归目标跟踪领域,图像跟踪系列博客继续更新。目标跟踪领域在2017年发生了许多大事件,新老牛人提出了多个有趣的算法,这些在VOT2017中都有体现。这篇博客介绍的CFWCR算法取得了VOT2017比赛的第二名,CFWCR正是以MD大神的ECO(我之前的博客介绍过该算法)为Baseline的(CFWCR作者表示复现不了ECO的效果,这就很尴尬了),于是CFWCR的效果出来之后,就成为CF派系的重量级算法。
使用LaTex进行算法排版
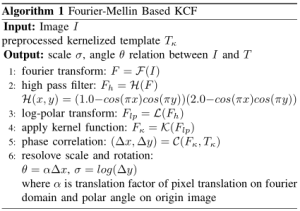
在论文写作和排版过程中,常常会用到算法描述,在LaTex中,算法描述块的排版会用到两个宏包 \usepackage{algorithm} 和 \usepackage{algorithmic}。算法的排版,主要在于控制缩进、粗体、横线等格式,这些都会在这篇博客中进行介绍。
LaTex强制图片位置
在LaTex中,\begin{figure}[~]是图片环境,常用选择项[htbp]是浮动格式:
[h] ~ here,当前位置。将图形放置在正文文本中给出该图形环境的地方。如果本页所剩页面不够,这一参数将不起作用。
[t] ~ top,顶部。将图形放置在页面的顶部。
[b] ~ bottom,底部。将图形放置在页面的底部。
[p] ~ page of its own,浮动页。将图形放置在一个允许有浮动对象的页面上。
Visio绘图去除外围边框,导出无页边距的pdf文件
Visio绘图过程中,如果要导出和绘图大小一样大的pdf文件,应该怎么做呢?
首先需要在设计中,选择纸张大小自适应绘图区域,然后如果要去除页边距,那么就要进入开发者模式来进行设置。这篇博客主要介绍如何导出无页边距的pdf绘图。
LaTex在双栏模式下插入跨栏图表
在使用LaTex进行排版的过程中,常常遇到双栏或者三栏的排版格式,但是我们在插入图表时,有时需要让图表横跨多个横栏。这篇博客就是主要介绍如何在双栏(或多栏)模式下,插入跨栏图。
Electronics Letters(电子快报)投稿经历
临近年末,又要开始准备论文投稿了,半年前投稿Electronics Letters的文章被拒稿,期间审稿超过四个月,并且没有任何审稿意见,从这一点上来看我是不看好这家期刊的。不过,失败是成功他妈,这次投稿经历应该还是值得分享的,如果能对正在投稿EL的作者有帮助是最好的,不过还是建议不要投该期刊,体验实在太差了。
计算机视觉和模式识别领域的SCI期刊
计算机视觉和模式识别领域的代表就是四大顶会了:ICCV、ECCV、CVPR、NIPS,还有就是难度最高的PAMI了,这些都让人望而生畏。那么除了这些耳熟能详的期刊和会议之外,还有哪些该领域的期刊呢?
下面我收集了一些该领域的代表性期刊,并介绍了他们的影响因子以及投稿难度和审稿周期。希望对大家有帮助吧,后期大家还有发现的可以留言,补充哦。
使用C++在Windows/Linux下精确计时
在Windows和Linux下有多种计时方式,包括Windows定时器(精度大约在15ms),借助CPU的多媒体定时器(精度在1ms左右)。然而在计算机主板上都有专门的时钟芯片,可以提供极为精确的时间,在选择计时方式时,要考虑到,获取约精确的时间,就要耗费更多的资源,在实际编程时应根据使用条件选择合理的计时方式。这篇博客将介绍Windows/Linux下获取精确时间的方法,并提供一个封装较好的简单计时类。
几种点云配准算法的优劣概述
点云配准是计算机视觉的热门研究方向,目前对于刚性点云配准的研究比较全面,对于非刚性点云配准算法的研究相对较弱,总体上来说,ICP、卡尔曼滤波等见到的比较多,这篇博客也只是对一些点云配准算法的简单摘抄以做记录。
图像配准的常用方法

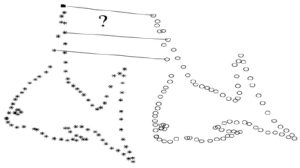
图像配准的方法大致分为三类,一类是基于灰度和模板的,这类方法直接采用相关运算等方式计算相关值来寻求最佳匹配位置,方法简单较为死板,一般效果不会太好。第二类是基于特征的匹配方法,如sift、surf点特征,或者向量特征等等,适应性较强。第三类是基于域变换的方法,采用相位相关(傅里叶-梅林变换)或者沃尔什变换、小波等方法,在新的域下进行配准。
我之前的博客介绍过傅里叶-梅林变换进行图像配准,其实也就是基于相位相关的原理,结合对数-极坐标变换进行图像配准,并给出了源码。这篇博客是对以上三类方法的小总结,无源码,都是废话,见谅。
无人驾驶汽车工作原理及关键技术
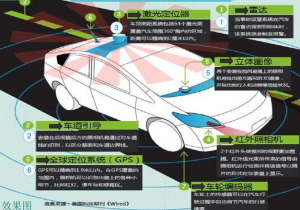
作为研究生,科研工作进入最后阶段,繁忙于各种非技术性问题,已经不太有看Paper分享新东西的精力,网站内容也很久没有更新,考虑到今后可能进入无人驾驶领域,有空时会Post一些科普性的ppt,可能会有些琐碎浅显。个人的考虑是,即使降低原创性和质量,也有必要维持网站内容不断更新,以后有机会从事新的研究,再不断的来分享。
作为计算机视觉研究者,无人驾驶无疑是对目前计算机视觉技术、传感器技术的总结,这篇博客主要介绍(科普)一些无人驾驶的工作原理和关键技术。
Piotr Dollar目标检测工具箱,样本标注与训练工具Matlab

Piotr Dollar在行人检测方面有着深入的研究,尤其是在深度学习兴起以前,其对Adaboost的研究优化和改进令人瞩目,其目标检测工具箱Piotr Dollar’s Toolbox被广泛使用。在使用该工具箱的过程中,我们通常需要手动勾选正样本,不得不承认,在监督学习的过程中,标注样本是重要,且费时费力的重复体力劳动,提高标注的效率至关重要。
博主在这篇博客中,释出一份配合该工具箱使用的GUI程序,帮助勾选样本,进行标注。