未来的自动驾驶系统将主要依赖摄像头(博主认为激光雷达是目前视觉硬件和算法不完善条件下的替代品,目前使用激光雷达切实的降低了落地的难度,但是是否真的需要,尚未有定论),车载系统的图像传感器和之前在其它领域使用的传感器的选型指标有明显区别。

WSL安装Pytorch
参考链接:Enable VIDIA Cuda in WSL2 Win10使用Ubuntu+VSCode写pyt … 阅读更多


FFMPEG简单例程
最近在处理HDR10格式的视频,在视频领域ffmpeg和开源解码器可以帮助我们解决大部分视频编解码和格式封装的问题。
论文速览:Automatic Flare Spot Artifact Detection and Removal in Photographs

强光处会出现耀斑伪影,耀斑伪影问题常常出现在手机拍照中,由于镜头设计的缺陷,强光伪影很难从镜头模组设计上去除(iphone12promax的夜间伪影尤为强烈,基本导致拍摄画面不可用),于是耀斑伪影问题交给计算摄影来解决。
这篇博客介绍论文 : 照片中耀斑伪影的自动检测和去除 Automatic Flare Spot Artifact Detection and Removal in Photographs 。2019年 Journal of Mathematical Imaging and Vision。
论文速览:Optical Flow Estimation from a Single Motion-blurred Image
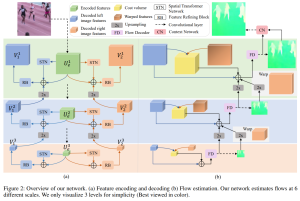
AAAI 2021接收论文,使用单帧模糊图像估计光流。论文地址:https://arxiv.org/pdf/2103.02996v1.pdf
论文主要有三个贡献:一是首次实现通过单帧运动模糊图像估计光流和运动,二是从视频序列中生成运动模糊图像和groundtruth来训练网络,三是将结果用于运动模糊去除和运动目标分割。
保边滤波之BEEPS
BEEPS,即双核书边缘保护平滑滤波器(Bi-Exponential Edge-Preserving Smoo … 阅读更多

从RNN到Seq2Seq

循环神经网络RNN结构被广泛应用与NPL领域,在机器翻译、语音识别、文字识别等方向大放异彩。后来RNN产生了多种变种,其中Seq2Seq结构和Attention机制被证明在语义理解方面有很大的增益。博主也很久没有碰过这块内容了,简单的摘抄和拼凑,权当复习笔记了 0.0
Matlab处理AppleProRaw
使用raw图工具打开AppleProRaw可以发现它是一个四通道线性rgba图像,博主用matlab写了一个处 … 阅读更多
曝光图像融合算法之DeepFuse
曝光图像融合通常的应用场景是HDR,传统的图像融合算法分为两类,一类是像素级的图像融合,通过将图像不同频段分离,在像素层及进行融合,另一类是基于变换域的方法,把图像变换到频率、小波域进行图像融合,最后再反变换回来,有些类似于同态滤波的形式。博主之前介绍过Mertens Exposure Fusion、Pyramid Blending、Possion Blending等都是经典的传统图像融合算法。
传统图像融合算法在融合曝光程度差异小的图像时非常有效,但是图像之间曝光差异程度大的时候融合结果就会出现瑕疵,事实上极端曝光情况下的图像融合具有非常大的挑战,这篇博客介绍一种基于无监督的图片融合算法DeepFuse,看名字就知道这是一种CNN的算法实现。