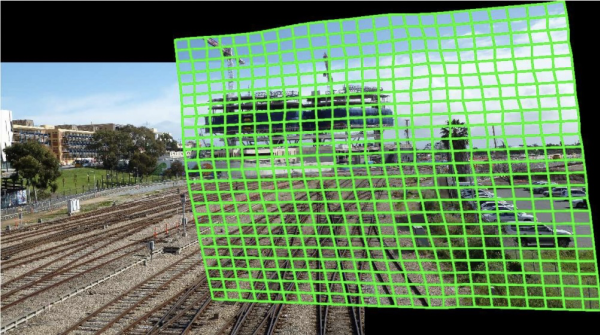
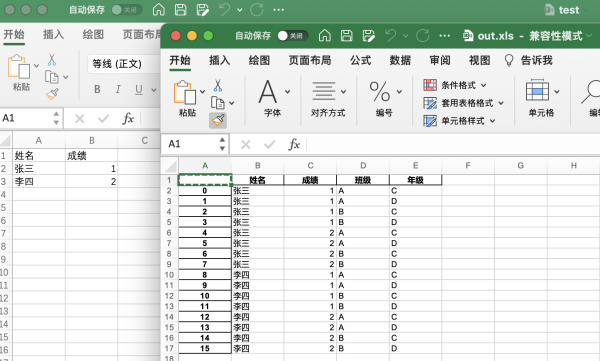
上一篇博客给了一个QImageView类,其中实现了图片浏览器的基础鼠标操作,在此基础之上,进一步实现鼠标框选的操作。具体实现时,我们先构建一个场景类QImageScene,用于管理场景中的Item,场景中的Item主要有两类,一类是图像,另一类是选择框。对于选择框的操作,我们把鼠标事件定义在QImage Scene类中。
Pyside6实现的ImageView类
实现了一个ImageView类,继承自QGraphicsView,主要overwrite鼠标和滚轮事件,实现基本的拖拽,以鼠标中心点进行缩放。
MATLAB符号工具箱(三)求导数和驻点
使用符号工具箱求导函数,以及使用solve解方程的一个简单例子:
MATLAB符号工具箱(二)解带约束条件的方程组
两个例子, 一是用solve函数解带约束条件的方程组, 二是用fmincon函数解带约束条件的最小化问题 一个 … 阅读更多
Matlab符号工具箱(一)化简方程
翻老代码发现之前写了一个简单的符号工具箱化简方程,好久不用遗忘了,留个代码备份
精细光流估计
这篇博客是论文:High Accuracy Optical Flow Estimation Based Theory for Warp 的笔记,论文为2004年,在2015年EpicFlow方法中引用。
在稠密光流估计中,最后一步往往是将光流图进行Refine和smooth,来确保光流在空间上连续,大部分区域符合刚体运动假设,同时也会处理遮挡,为遮挡区域提供连续的光流值。
在介绍的论文中,建立了一个能量函数,将光流图的优化和优化能量函数联系起来。论文偏向传统,但是也很经典,接下来一起看下做法。
Biratral Grid与HDRNET论文笔记
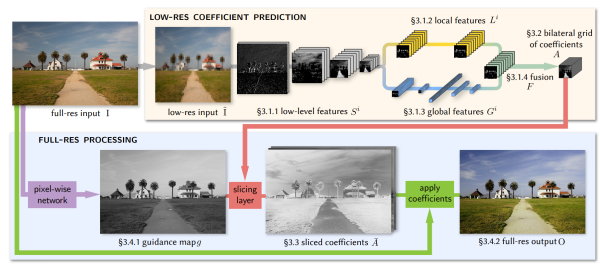
这篇博客介绍 Google 近年来在Photography方面一篇具有代表性的论文,Deep Bilateral Learning for Real-Time Image Enhancement
HDRNET的主要特征数数据分成两路,低分辨率偏向high level语义,这一路学习到的是一系列参数(分mesh的3×4 color matrix),学习参数需要的计算资源相对于学习输出图需要的资源更少,移动端部署更加方便。高分辨率一路更偏向low-level引导,学些引导图和参数apply。
FILM大运动插帧
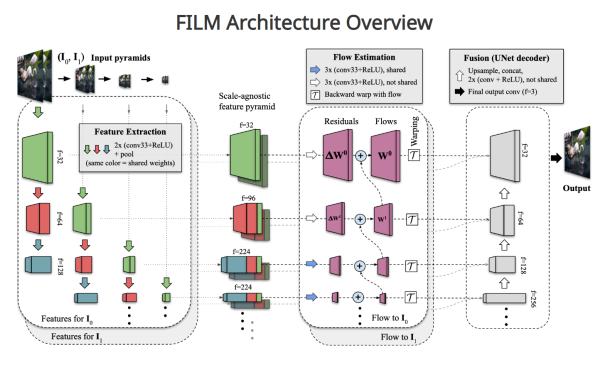
两张图片就可以生成一小段视频,效果很不错,可以直接在网站上用demo玩儿一玩儿。
网站和源码:https://film-net.github.io/
Google AI Blog:https://ai.googleblog.com/2022/10/large-motion-frame-interpolation.html
RTSR(一)Edge-SR 一层网络做超分

京东方的一篇论文,主打轻量级网络做Real-Time SR,只有一层,对标传统bicubic上采样,因为轻量,所以实用,同时一层网络的可解释性也更强。
论文地址:Edge-SR:Super-Resolution For The Masses
Stable Diffusion 本地部署指南
部署stable diffusion ai绘图,需要 nvidia 显卡,至少需要6G显存(显存越大越好,高清图片需要更大显存)。这篇博客适用于一些有代码基础的同学(也就是不会手把手告诉怎么搭建python环境、clone代码),完全没接触过代码的同学可以找其它教程。
Stable Diffusion 官网地址: https://stability.ai/blog/stable-diffusion-public-release
Stable Diffusion 代码仓库: https://github.com/CompVis/stable-diffusion
模型下载(该链接建议从头阅读):https://stable-diffusion-art.com/models/#Stable_diffusion_v15
https://huggingface.co/CompVis/stable-diffusion
训练和使用Lora:https://zhuanlan.zhihu.com/p/624230991
webui:https://github.com/AUTOMATIC1111/stable-diffusion-webui
卷积滤波核的FFT频率响应分析
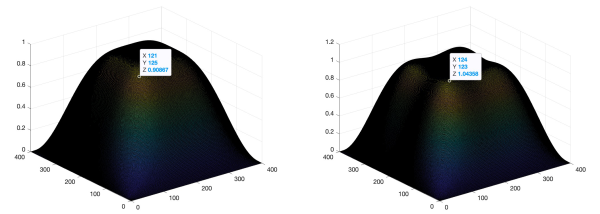
各种不同的卷积滤波核有不同的频率响应特性,我们以bicubic插值kernel为例,用Matlab绘制出频谱图,可以看出卷积后哪些频率成分会被加强,哪些频率成分会被减弱。
首先分享一个介绍图像傅立叶变换的资料:https://www.cs.unm.edu/~brayer/vision/fourier.html
IEEE754 Float 规格
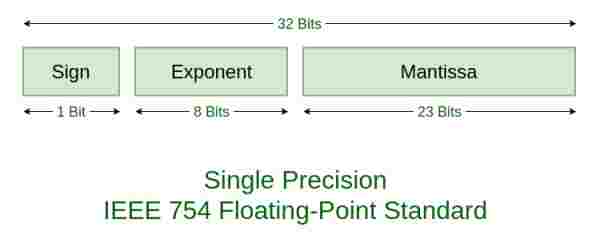
IEEE Float、IBM Float、VAX Float 都是常用的浮点数标准,其中IEEE745 Float 的浮点格式规范应用最广泛,这篇博客主要介绍IEEE754浮点格式规范。
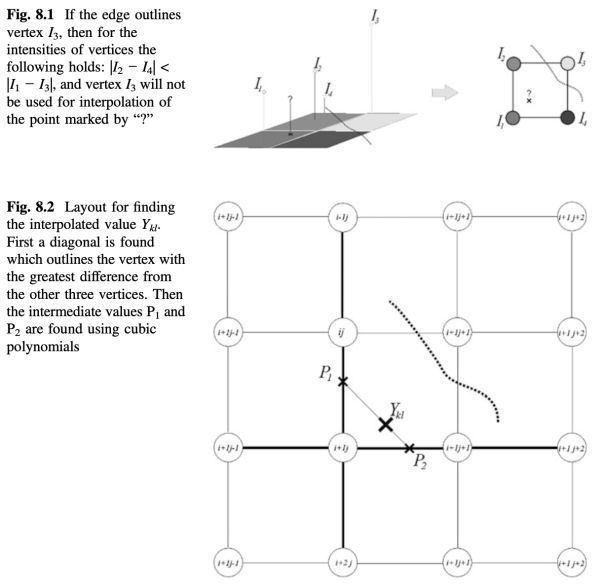
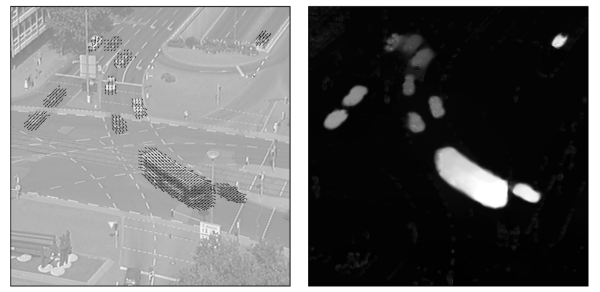
图像降噪算法 Multi Scale DCT Denoise
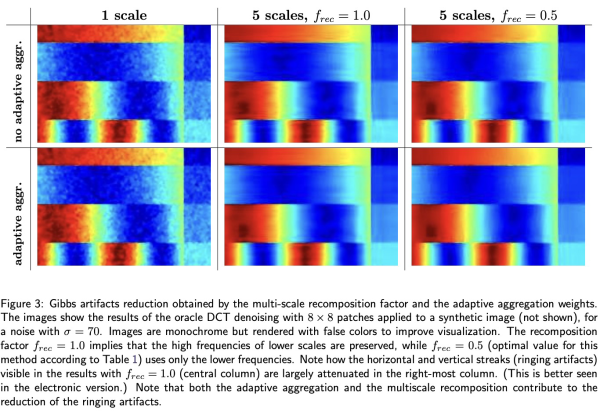
Multi Scale DCT Denoise(MSDCT)是经典的传统降噪算法,这篇博客予以简单介绍。原始论文:https://www.ipol.im/pub/art/2017/201/article_lr.pdf, C++源码,可以在ipol网站找到:https://www.ipol.im/pub/art/2017/201/?utm_source=doi