前面博客介绍了期权四个基本交易方向,在此基础上,我们看一些期权的交易策略。
在期权交易中,我们不仅可以做多(做空)股价,还可以做多(做空)波动率。跨式组合(straddle)和宽跨式组合(strangle)是较为常用的手段。这篇博客介绍 straddle 和 strangle 交易策略 和 Python绘制收益曲线。
a blog driven by interest~
Cargo 是 Rust 的构建系统和包管理器。它可以帮助开发人员下载和管理依赖项,并帮助创建 Rust 包。 … 阅读更多
高阶插值很多都有overshoot,我们期望插值kernel是单调的,这篇博客介绍几种无overshoot的插 … 阅读更多
在图像算法开发过程中,如果考虑引入Gui,不需要Qt 、PySide等复杂的插件和优秀的界面模版的话,Open … 阅读更多

前面博客介绍了期权四个基本交易方向,在此基础上,我们看一些期权的交易策略。
在期权交易中,我们不仅可以做多(做空)股价,还可以做多(做空)波动率。跨式组合(straddle)和宽跨式组合(strangle)是较为常用的手段。这篇博客介绍 straddle 和 strangle 交易策略 和 Python绘制收益曲线。
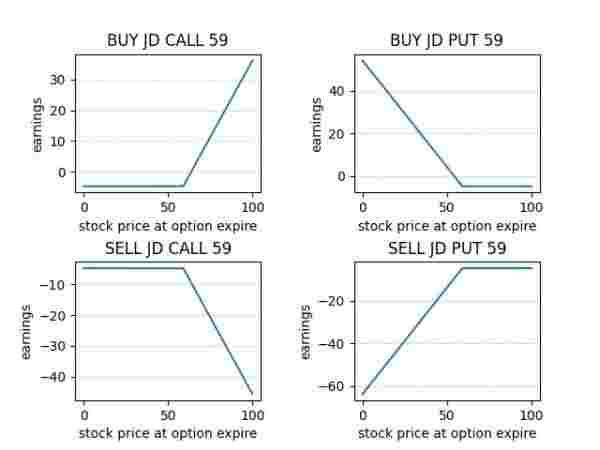
我们都熟悉期权有四个交易方向Buy Call,Buy Put,Sell Call,Sell Put,这篇博客主要用python计算这些基本交易方向的投资收益。
期权自诞生以来,其定价一直是不断被研究的问题。如今诞生了多重期权定价模型,二叉树、B-S、B-S-M、BAW、蒙特卡洛等定价模型都被广泛用于金融工程。这篇博客简单介绍二叉树定价和B-S定价模型推导的原则和假设,不涉及推导细节。

在处理图像和三维数据方面有一个强大且拓展性强的软件ImageJ,ImageJ本身功能不是特别多,但是多年以来积累了丰富的插件,使得其成为专业图像处理和数据科学、医学图像处理等领域的利器。FIJI ImageJ打包了很多插件,可以实现很多功能,但是总有需求超出功能的时候,我们可能希望自己开发插件。
ImageJ支持多种形式的拓展,支持用我们熟悉的Python语言(Jython)进行拓展开发,也支持JS脚本的macro开发,还支持Java开发的插件。实际上ImageJ开发插件是很简单的,有时候我们只需在demo代码基础上改上短短几行就能实现我们自己定制化的功能。这篇博客主要简单介绍script、macro和plugin开发的流程,指引一下资源位置,给简单的流程介绍,不会具体深入代码层面。
mac默认的鼠标速度是很慢的,即便在系统设置中把鼠标速度拖到最快依然觉得慢,这是还可以通过终端来修改全局鼠标速 … 阅读更多

微软的windows搭配上自家的powertoys使用体验是很棒的,博主认为几乎是windows必备软件了,可以极大提升系统操作体验(甚至可以和Mac体验一样便捷),以至于博主要专门写一篇博客记录一下。
PowerToys一般设置成开机自动启动即可。PowerToys提供和系统深度融合的取色、应用置顶、图像大小调整、桌面多区域、鼠标高量、类似Mac聚焦搜索等功能。软件下载地址:https://github.com/microsoft/PowerToys/releases/
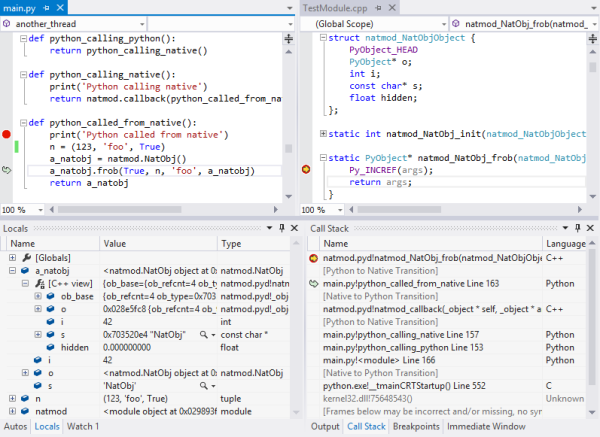
前面我们介绍了C++调用Python的环境配置、函数调用传参,这一节系统介绍C++调用Python常用的API,除了调用函数之外,我们还可以实现直接执行脚本的功能。
如果想要在zsh中使用code命令启动vscode,可以编辑 ~/.zshrc 文件,添加如下代码 然后sou … 阅读更多

这篇博客介绍mac上cisico的安装配置,介绍配置文件,做一个比较干净的使用环境。如果是M1 Mac则需要选择适配版本4.10.02086以上(2021年11月之后版本),如果版本低一些也可以运行,只不过是以罗赛塔2转译的方式运行,当然还是适配了arm64的apple silicon版本更好。
上一篇博客我们介绍了C++调用python的环境配置,这篇博客介绍下C++调用python时的参数传递方法,包括如何传递 变量、结构、字典、数组、图像以及多维数组。