VBA(visual basic application)是visual basic的一种宏语言,是依附于Microsoft Office系列软件的自动化语言。Excel是作为Microsoft Office系列软件中最常用的程序,被广泛应用于数据存储和处理。
宏是一系列可执行的VBA程序的集合,它可以帮助执行一项或者多项操作。
a blog driven by interest~
VBA(visual basic application)是visual basic的一种宏语言,是依附于Microsoft Office系列软件的自动化语言。Excel是作为Microsoft Office系列软件中最常用的程序,被广泛应用于数据存储和处理。
宏是一系列可执行的VBA程序的集合,它可以帮助执行一项或者多项操作。
AprilTag2在速度上是不尽人意的,原因在于梯度计算和聚类的庞大计算和内存开销。在AprilTag3中进行 … 阅读更多
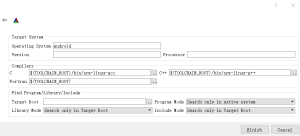
在交叉编译中,NDK是一个很好的工具。windows、linux、android、32bit、64bit,能够处理绝大部分程序的交叉编译。而CMake组织程序又使得程序具有良好的跨平台编译。NDK下载好之后,工具链无法直接被cmake使用,需要通过一个脚本生成独立的工具链。这篇博客介绍CMake使用NDK的独立工具链。
博主认识的几种线段检测算法有:Hough变换法、LineSegementDetector (OpenCV3中加入的算法)、FastLineDetector(在opencv的contribute模块中)。LSD算法的速度让人望而却步,FLD算法一大堆参数很难调优,并且速度并没有特别快。在使用这些算法的时候或多或少都遇到了问题,于是EDlines算法浮现在眼前,快速,并且效果不错。 Ed就是EdgeDraw的缩写
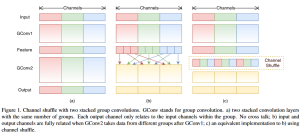
在图像分类应用下,诞生了不少经典网络。ShuffleNet以速度快和便于移植而著称,这篇博客将简单介绍ShuffleNet,以及Pytorch下模型的训练、保存、微调、生成CaffeModle。
在windows上运行pytorch时,稍不注意就会遇到freeze_support()的错误。解决这种错误只 … 阅读更多
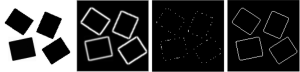
最近在想把文件编码到图像,于是就先试着把文件编码到了QRCode,然后再解码恢复。python生成qrcode的包就是qrcode包,识别二维码并解码使用的是zbar。这篇博客就简单说下这两个工具的使用。
厌倦了国内繁琐的备案和审查,对无缘无故的网站关停感到无奈,服务器搬到东京后的第一篇博客 ,点开网站速度超级快,心情顺畅,来一发博客。
我们在开发自己的脚本或者编程工具后,可以定义自己的代码自动补全。这篇博客将介绍Sublime中两种添加自己代码补全的方式:代码片段snippet和 completions。

机器视觉主要解决四大问题:定位、测量、检测、识别。在机器视觉中打光和光源影响着系统的稳定性,比如在测量应用中,光照发生10%-20%的变化,就可能导致图像边缘偏移1-2个像素,这些问题在算法层面是不容易解决的。所以了解光源和打光非常重要

lua与python均为成熟的脚本方案,它们的不同在与体量,Lua的体量小,高效的执行方式适合嵌入式,python胶水的强大不言而喻。那么如果自己已经有了lua脚本的解决方案,python能否调用呢?答案是肯定的,这篇博客将介绍python中集成的lua环境包:lupa,简单介绍该工具的使用。
条码和二维码搞了许久,之前在做二维码识别的优化,想能搞出多少花来呢?最近需要在极小的内存下完成二维码的识别和解码。顿时头大了,不过锅刚刚解了,就来说一说。
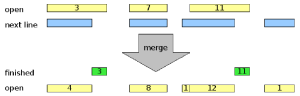
条码和二维码的特点就是我们前处理之后,都是处理的二值图像。那么在二值图像上操作有什么好方法呢?不卖关子,说出答案了:游程编码。
最近英语课上聊到了互联网兴起以来,交流方式的变化,博客是互联网最早的形式之一,已经相当老了,现在的交流变得更加简短,与微博和朋友圈不到一百字的简短相比,博客是相当长的了。可能是现代人太吝啬自己时间了,写博客的人越来越少,并且博客质量下降,得益于信息的快速传播,也出现了天下文章一大抄的现象。不过我想,还是有些东西需要实实在在的篇幅来沉淀的,于是想起有还有坑没有填,就快点过来把坑填完了。
通常我们使用游程编码的原因是因为游程编码更快,并且更加节省内存,游程编码可以做很多事情,其中就包括形态学操作,这篇博客将详细介绍在游程编码上实现形态学操作。