这部门内容是博主的个人笔记,没有代码,只有思路,也不公开代码。
QRCode二维码的关键是三个定位点的获取,我们借助AprilTag,解码部分的算法和ZXing相同(实践证明非常鲁棒)。
a blog driven by interest~

随着OpenCV4.0.0的正式Release,OpenCV已经走过了18个年头,OpenCV4中加入一些有意思的新算法,其中就包括二维码识别。OpenCV的二维码识别究竟如何呢?和其它开源二维码识别库相比有哪些优劣呢?博主将带你简析代码,分析性能。

OpenCV4.0.0正式release了,其中加入了二维码识别功能,有幸博主最近开始折腾二维码识别,发现二维码的核心就是那三个定位点和辅助对齐点。ZXing和OpenCV都是通过二维码定位点的11311来进行定位的,这是利用了二维码最显著的特征。但是博主会处理一些变态的情况,比如过曝光到11311定位点无法找到(即图像中定位点的黑白间隔不是1:1:3:1:1),于是就需要通过其它方法来找定位点了。一个标志识别库摆在眼前:AprilTag。(OpenCV中集成了类似的库,似乎叫做ARTag,没研究过)
AprilTag诞生于2011年的一篇论文,2016年出了AprilTag2,但是16年的论文感觉没讲啥,再加上看的cpp代码是2013年的,于是这篇博客就对着2013版本来讲好了,我们开始吧。
产生该错误的原因是matplotlib的代码维护者希望他们的代码干净,就把这种sidepackage给移除了, … 阅读更多
上一篇博客是《基于最小二乘法的椭圆拟合》,这篇博客介绍另外一种方法。由于现在正处在人生的特(工)殊(作)时(太)刻(忙),所以没怎么写,主要还是贴论文。
不同于最小二乘法直接拟合椭圆方程,论文中通过惯量矩,来预测角度、长轴、短轴,结合中心,来计算得到椭圆参数。实际工程实践中采用游程编码表示区域,该方法亦是Halcon中计算区域等效椭圆的方法,详看论文,谢谢。
这篇文章是 least-squares fitting of circles and ellipses 这篇paper的导读。我们如何使用最小二乘法去拟合圆和椭圆呢,当我们用“代数方程”来表示圆时,我们最小化这个目标函数的实际意义是什么呢?我们按照这个方程得到的结果却不一定是合适的。我们实际上想要的是实际中每个点,到该曲线上的距离最小。
于是,我们按照一个“几何方程”来进行构造。这个几何方程描述的优化方向是,每个点到曲线的距离最小。我们使用雅可比矩阵QR分解来解算圆的参数,对于椭圆参数,存在更多情况,看Paper吧:
工作之后时间越来越少,也在思考繁忙之下自己是否仍对技术拥有热情。答案是肯定的,并且,身处这个行业,也是需要不断学习的,积少成多,滴水穿石。之前写博客,或多或少想分享些有用的东西,现在环境的改变已经使得这些越发困难了,但是仍可以通过博客记录自己学习和成长的脚步。以下是来自繁忙生活中一份简简单单的笔记:
Jacobian矩阵包含了我们需要计算输出和输入的所有偏导数,这样的矩阵被称为Jacobian矩阵。
或许我们只对其中的二阶导数感兴趣,或许因为高阶导数计算量过大,所以我们使用Hessian矩阵,该矩阵包含了一个函数的所有二阶导数。
使用CMake组织工程已经成为习惯,因为在许多场合,跨平台与协作开发显得尤为重要。摘抄一些常用的Cmake信息,以随时查阅。

近期,央行重启逆周期因子,人民币兑美元汇率从6.95一路走高,到达6.8,通过了解逆周期因子和人民币汇率形成机制,可以分析判断出汇率走势。
811汇改以来,人民币汇率形成机制经历了五次变化:

每当经济发展遇到问题时,美联储都会从工具箱掏出一系列工具来应对。在2008年开始的衰退中(次贷危机),美联储采用了包括前瞻指导和量化宽松在内的一系列工具,避免了1929年式的大萧条。这篇博客就主要从宏观经济学角度介绍流动性陷阱、前瞻指导和量化宽松。(最近美联储考虑取消前瞻指导)
很久没写博客了,技术博客再开!
进入新环境,适应段时间之后又开始了新的学习。Cmake是编程领域重要的工具。这篇博客就介绍从零开始的cmake教程。
补:又发现一个简介明了的cmake教程http://www.hahack.com/codes/cmake/。
经济学的教材翻来翻去还是曼昆写的好,这本《宏观经济学(第九版)》印刷质量、书的手感都很不错,所以一口气看了下来,虽说是教材,但对博主外行来说纯粹科普了。
最近看高中都要开人工智能课了,以后人工智能也会成为常识一样的东西。看了《宏观经济学》就在想,这些点点滴滴都是无时不刻 渗透在生活中的,也是应该普及了解的。即使不去做专业的投资,也要明白这个世界时刻发生着什么,因为这关系着我们的钱包*^_^*。
这篇博客是博主的读书笔记,因为博主也是当科普读物来读,纯当是为自己以后回忆起来方便,所以基本上就是思维导图的形式呈现,推荐看原作。
即使拼命回望过去无法预知将来,从过去中总结出的规律就是没有没有规律,我们未曾知道未来会有怎样的惊喜。
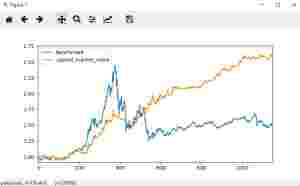
未来难以捉摸又何妨,仍不妨碍我们把握当下,勇敢的选择与判断。随着模型复杂,量变到质变,我们的确可以有所改善。我们从一个简单的策略开始:双均线策略。
这节博客我们将使用tushare来设计一个简单的策略框架,并在其中实现一种简单的策略:双均线策略,并与benchmark做对比。
[python]项目在github开源:项目地址(demo文件夹下)。
流动的水没有形状,漂流的风找不到踪迹,变化的规律无处可寻,这节博客带来的是数据分析工具Pandas。
包括tushare在内的很多财经工具包,都使用pandas进行数据分析。在tushare中,获取数据的格式主要就是pandas中的DataFrame二维表格。