现代图像传感器一般为面阵CMOS或CCD,当传感器像素空间频率和条纹空间频率接近时,就会出现摩尔纹。从原理上讲就是两个频率相近的波相互叠加,会产生差拍。
摩尔纹的消除比较困难,目前主要方法分为两类,第一类就是从设计上避免摩尔纹产生,将成像弥散圆设计的比像素要大,这样相当于降低成像的分辨率,来保证采样频率不会到达条纹频率;第二类方法就是后期通过算法来解掉摩尔纹,对于彩色图像,需要结合bayer pattern来处理,photoshop就有这样的功能。
a blog driven by interest~
DNG是一种很灵活的图像格式,是在Tiff基础上拓展来的,随着传感器技术、后期图像处理能力的增强,我们很多时候直接将ISP采集的图像数据直接Dump下来,不做任何处理,这就是RAW图,同时我们把处理RAW图需要必要信息存下来(Bayer Pattern、白平衡、噪声水平等),然后我们就可以进行后期处理了。总之,DNG是一种RAW图格式,其中除了数据段之外,有很多标签信息。
Matlab中混编C++可以在提高代码效率的同时保持良好的脚本调用,在Matlab中可以用mex来编译C++代码,mex的命令怎么用可以直接doc mex看到。这篇博客主要因为博主需要跨平台编译,刚好遇到Matlab版本不同而产生的一些奇奇怪怪的问题,主要是记录博主自己踩过的坑。
这篇博客介绍的是Excel通过excllink插件调用matlab。excllink是官方提供的工具,在安装Matlab时如果勾选该toolbox,则会自动安装,但是安装好之后我们还需要在Excel中进行配置。
Matlab嵌入C++是很容易的,嵌入C++的matlab在保持易用性的同时,可以加快程序速度。嵌入的C++代码不能直接在matlab中断点调试,需要借助Visual Studio之类的工具进行调试。这篇博客主要以简单的demo导入,介绍如何在Matlab中嵌入C++程序。
本章是本系列教程的重点。但我觉得应该不是难点。从第零章开始到学完本章,应该可以把VBA用于实战中了。
Excel对象主要有4个:
使用VBA对当前文件所在目录下的所有Excel文件中的所有Sheet中的所有单元格进行遍历的演示程序。
前面讲过,VBA代码有两种组织形式,一种就是过程(前面的示例中都在使用),另一种就是函数。其实过程和函数有很多相同之处,除了使用的关键字不同之外,还有不同的是:
数组和字典也是VBA的常用到数据类型之一。但是我翻了有四五本VBA教程相关的书,里面都没有介绍到字典,数组到是在介绍数据类型时有介绍,而并没有提到字典。
事实上,字典不是VBA内置的类型,它是Windows脚本语言的。但其实字典在VBA中也是非常重要的,它非常适用于需要进行非重复性数据的操作。我多次需要使用到字典,但很少用到数组。
定义数据类型的优点有2个:
VBA中的基本数据类型有多种,但常用到的只有其中一半左右。
开发工具->插入->按钮,然后选择定义好的vba模块就可以了。右键点击按钮调用VBA代码,左键点击按钮进入按钮编辑状态。
列出当前目录下的表格文件,VBA程序。
VBA(visual basic application)是visual basic的一种宏语言,是依附于Microsoft Office系列软件的自动化语言。Excel是作为Microsoft Office系列软件中最常用的程序,被广泛应用于数据存储和处理。
宏是一系列可执行的VBA程序的集合,它可以帮助执行一项或者多项操作。
AprilTag2在速度上是不尽人意的,原因在于梯度计算和聚类的庞大计算和内存开销。在AprilTag3中进行 … 阅读更多
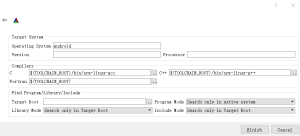
在交叉编译中,NDK是一个很好的工具。windows、linux、android、32bit、64bit,能够处理绝大部分程序的交叉编译。而CMake组织程序又使得程序具有良好的跨平台编译。NDK下载好之后,工具链无法直接被cmake使用,需要通过一个脚本生成独立的工具链。这篇博客介绍CMake使用NDK的独立工具链。
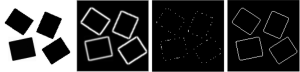
博主认识的几种线段检测算法有:Hough变换法、LineSegementDetector (OpenCV3中加入的算法)、FastLineDetector(在opencv的contribute模块中)。LSD算法的速度让人望而却步,FLD算法一大堆参数很难调优,并且速度并没有特别快。在使用这些算法的时候或多或少都遇到了问题,于是EDlines算法浮现在眼前,快速,并且效果不错。 Ed就是EdgeDraw的缩写