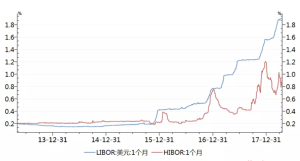
在外汇交易市场和期货交易市场,存在着升水和贴水的概念。升水,远期汇率比既期汇率高,意味着外币升值。贴水,远期汇率比既期汇率低,意味着外币贬值。对货币来说,利率高的货币大多贴水,利率低的货币大多升水。
对于期货而言,则可以直接通过基差的概念来定义升水和贴水。期货和现货哪个价高哪个就是升水,哪个价低哪个就是贴水。
a blog driven by interest~
最近毕业方面也是好消息不断,于是又闲下翻了下《失控》,想到人类简史最后一章,开了发脑洞。
这一章节加到人类简史(五)从动物到上帝中去了,因为上篇博客已经是完结篇了,这篇博客是后来开的,所以和上篇博客内容有些重复。
《失控》预言了本世纪几乎全部的重大科技进步:互联网、大数据、人工智能、去中心化、数字货币、基因编辑、虚拟现实、意识操控、意识转移、这些东西离我们越来越近,科幻片中的内容逐渐在变成现实。
如果说关注人类几百年后的发展太过遥远,那么从可能的结果中关注宏观发展过程也是有意义的。那些十年前就预见互联网、数字货币、人工智能的红火的人,早已从过去的投资中收货颇丰……话说回来,这篇博客纯脑洞,还是强势推荐《失控》。
《失控》的内在逻辑是,一个复杂的系统不是一开始就有的,同时也是一个自治的系统、具有一定的层级结构,带有意识涌现,能够共同进化。人与机器是同一事物的两面,最终将走向统一。
《失控》每个章节一个小主题,内容不是很多,纯粹当摘抄了。又是关于自治系统与人工智能的推演,分布式的快速、廉价、失控的特点。(这里失控第一次出现,应该是个引子吧)
刚经历完读研期间的至暗时刻,恰逢同学回校,五一假期就这么浑浑噩噩了两天,觉得不能再这么下去了,于是乎就把这个大坑给填了。
《人类简史》算是一年多以前就想读,当时于是立马去图书馆借来了《人类简史——我们人类那些年》,读了一大半发现完全不对,这尼玛是本山寨书啊,封面就几个字不一样!书友们请注意,人类简史的正版是《人类简史——从动物到上帝》,以色列史学家尤瓦尔·赫拉利撰写。
跟室友吐槽完之后,刚好室友说他有这本书,然后我就借过来了,在我这里一放就是一年……所以说,今天把这个大坑给填了。结合博主自己的理解和认知进行总结,博主是个技术宅,文笔思想都不行,纯粹给自己做个笔记,请见谅指正。
读到第二章,就已经看出这本书的厉害之处了。作为一个深度学习研究者,看到这本上世纪八十年代的作品,不禁感叹,当今人工智能的许多理念甚至细节都已经在这本书中出现… 此处溢美之词省略一万字(笑)。
回想本世纪的技术进步:互联网、大数据、云计算、人工智能、去中心化(这里不说BTC,博主对BTC持保留态度)、MapReduce等等,这些都和一个词有关:分布式。这也就是这本书第二章节的核心内容。
博主将在自己的知识领域内,从深度学习、互联网、分布式系统、去中心化的角度来对“蜂群思维”进行描述。
目前只是读书摘录哈,后面再整理成笔记,读书时候不写点儿啥总感觉过会儿就忘了(说的好像跟写了就记得一样*^_^*)~
宗教发展出具有约束力的规范和价值观,并且在发展过程中逐渐具备普适性和推广特质,使得人类以另一种方式融合。(中间一大堆神学的东西直接略过了,博主无神论者,看看就好,博文后面摘录了佛教介绍的原文,感觉有点儿思想)
正统基督认为,每个个人体内都有一个自由而不朽的灵魂。然而,过去两百年间,生命科学已经彻底破坏了这个信念。科学家研究人类这个有机体的内部运作,并未找到灵魂的存在。
越来越多科学家认为,决定人类行为的不是什么自由意志,而是荷尔蒙、基因和神经突触——(在这点上)我们和黑猩猩、狼和蚂蚁并无不同。
帝国是一种政治秩序,有两项特征:文化多元性和疆界灵活性。帝国在能不改变政治认同的前提下纳入更多其他国家和领土。 … 阅读更多
本书的主题就是人造与天生的联姻。(第一章内容比较综述,博主直接摘抄了*^_^*)
由于我们创造的世界变得过于复杂,我们不得不求助于自然世界以了解管理它的方法。这也就意味着,我们创造出的环境越机械化,可能也越需要生物化。我们的未来是技术性的,单着并不意味着未来的世界一定会是灰色冰冷的钢铁世界。我们的技术所引导的未来,是一种新生物文明。
人们在将自然逻辑输入机器的同时,也把技术逻辑带入到生命之中。
在三维空间中,角向自由度常常用欧拉角表示,就是说欧拉角是形容两个坐标空间旋转关系的,所以思考问题时需要一定的立体感,而在欧拉角计算过程中,有常常涉及到一些关系计算和数学转换。
这篇博客摘录了即几篇优质博客的内容,涉及欧拉角、旋转矩阵、旋转向量、欧拉角换算等诸多问题。
先挂参考链接 https://blog.csdn.net/zgjorson/article/details/9132559
博主大体上是参照上面博客的,另外加了一些自己实现了功能,博客里面贴的有代码。
和参考博客有点儿不一样,上面博客使用的vtk5.2,博主使用的是vtk7(比起原博客注释了两行代码),另外博主添加了相机视角设置,OpenGL绘图也有区别。
网上的TeeChart破解只有v5和v8,而v5和v8只能用来编译32位程序,编译64位程序时虽然可以编译通过,但是运行会出错。如果想要编译64位的TeeChart MFC程序,那么就要使用2011年之后的版本。现在,2011年之后的版本没有破解,所以这篇博客只是提供一个评估版本,像是文中的效果,有水印存在,如果仅仅是调试程序,而非用于商业用途应该足够了。
挂上下载链接:TeeChart2018Eval完整包。安装好之后,在安装目录中可以找到32位控件teechart2018.ocx和64位控件x64/teechart201864.ocx,运行regsvr32 teechart201864.ocx注册它们就可以了。控件注册安装和使用与v5和v8一样,参见我前一篇博客。
首先挂上下载链接: TeeChart破解版(v5)。然后挂上一个演示工程:MFCTeeChart。然后是TeeChart8_ActiveX及安装使用方法。
MFC TeeChart是用来画图的,能查到这个页面来的都知道,就不多介绍。下面抓哟介绍TeeChart的安装和使用。这其中还有一个小问题,就是以上两个版本只能用来编译32位程序,需要编译64位程序需要2011年之后的版本,目前只有评估版本,参见我的另一篇博客。
MBTI职业性格测试是国际最为流行的职业人格评估工具,作为一种对个性的判断和分析,是一个理论模型,从纷繁复杂的个性特征中,归纳提炼出4个关键要素——动力、信息收集、决策方式、生活方式,进行分析判断,从而把不同个性的人区别开来。