立体视觉,版权声明,资源来自百度文库。
立体视觉是计算机视觉重要的分支,立体视觉的主要任务是通过二维图像恢复三维环境,是一项困难的逆向工程。博主很久之前看到过这份ppt,感觉非常nice也非常全面,Post上来以供分享学习。
a blog driven by interest~
美联储就是美国的“央行”。
综合反映美元在国际外汇市场汇率情况的指标,通过计算美元和对选定的一揽子货币的综合变化率来衡量美元的强弱程度。 … 阅读更多
文化在人类发展的历史中有着重要的历史低位,人类开始能够想象一些不存在的事物,那一刻开始,超过150人的团体被以这种方式组合起来,协同分工,最终统治地球。最初那一刻,犹如禁果,吃下时一切便不可阻挡。这就是认知革命。
——《人类简史·知善恶树》

级联CNN提出与2015年,在目标检测领域有着很成功的应用。好久好久好久没看过目标检测了,今天被问到这个,临时翻论文到源码,发现还是很容易理解的。只是好久好久好久没玩Caffe,发现Caffe现在丰富了太多。这篇博客介绍的MTCNN人脸检测,就是基于Caffe平台的,与级联CNN有关,清楚所有技术细节之后,决定写一篇博客记录一下。
时隔一年,再次回归目标跟踪领域,图像跟踪系列博客继续更新。目标跟踪领域在2017年发生了许多大事件,新老牛人提出了多个有趣的算法,这些在VOT2017中都有体现。这篇博客介绍的CFWCR算法取得了VOT2017比赛的第二名,CFWCR正是以MD大神的ECO(我之前的博客介绍过该算法)为Baseline的(CFWCR作者表示复现不了ECO的效果,这就很尴尬了),于是CFWCR的效果出来之后,就成为CF派系的重量级算法。
在Windows和Linux下有多种计时方式,包括Windows定时器(精度大约在15ms),借助CPU的多媒体定时器(精度在1ms左右)。然而在计算机主板上都有专门的时钟芯片,可以提供极为精确的时间,在选择计时方式时,要考虑到,获取约精确的时间,就要耗费更多的资源,在实际编程时应根据使用条件选择合理的计时方式。这篇博客将介绍Windows/Linux下获取精确时间的方法,并提供一个封装较好的简单计时类。
点云配准是计算机视觉的热门研究方向,目前对于刚性点云配准的研究比较全面,对于非刚性点云配准算法的研究相对较弱,总体上来说,ICP、卡尔曼滤波等见到的比较多,这篇博客也只是对一些点云配准算法的简单摘抄以做记录。

图像配准的方法大致分为三类,一类是基于灰度和模板的,这类方法直接采用相关运算等方式计算相关值来寻求最佳匹配位置,方法简单较为死板,一般效果不会太好。第二类是基于特征的匹配方法,如sift、surf点特征,或者向量特征等等,适应性较强。第三类是基于域变换的方法,采用相位相关(傅里叶-梅林变换)或者沃尔什变换、小波等方法,在新的域下进行配准。
我之前的博客介绍过傅里叶-梅林变换进行图像配准,其实也就是基于相位相关的原理,结合对数-极坐标变换进行图像配准,并给出了源码。这篇博客是对以上三类方法的小总结,无源码,都是废话,见谅。
作为研究生,科研工作进入最后阶段,繁忙于各种非技术性问题,已经不太有看Paper分享新东西的精力,网站内容也很久没有更新,考虑到今后可能进入无人驾驶领域,有空时会Post一些科普性的ppt,可能会有些琐碎浅显。个人的考虑是,即使降低原创性和质量,也有必要维持网站内容不断更新,以后有机会从事新的研究,再不断的来分享。
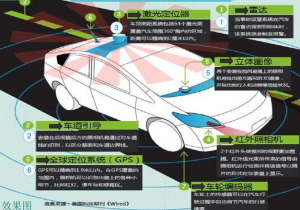
作为计算机视觉研究者,无人驾驶无疑是对目前计算机视觉技术、传感器技术的总结,这篇博客主要介绍(科普)一些无人驾驶的工作原理和关键技术。

Piotr Dollar在行人检测方面有着深入的研究,尤其是在深度学习兴起以前,其对Adaboost的研究优化和改进令人瞩目,其目标检测工具箱Piotr Dollar’s Toolbox被广泛使用。在使用该工具箱的过程中,我们通常需要手动勾选正样本,不得不承认,在监督学习的过程中,标注样本是重要,且费时费力的重复体力劳动,提高标注的效率至关重要。
博主在这篇博客中,释出一份配合该工具箱使用的GUI程序,帮助勾选样本,进行标注。
在基于双目立体视觉的工业机器人抓取系统中涉及三个坐标系:世界坐标系(现实世界中的坐标位置)、机器人坐标系(以机器人基座标 标识的坐标位置)和 相机坐标系(以双目相机中某相机光心位置为原点,光轴作为参考坐标轴的坐标表示)。这篇博客主要介绍立体视觉系统中坐标转化,以及实际操作中如何进行相机的标定和机器人的标定。
这篇博客主要是博主的实验流程记录,代码托管于github。
这篇博客主要介绍如何在MFC中为按钮添加图片或者图标。首先,在资源管理中添加图片或者图标资源,图片资源只能是BMP图片,图标资源只能是ico图标。
在使用MFC时,想要在鼠标停在按钮上时,显示文字提示信息,这篇博客主要给出实现这部分功能的代码。
SpinButton鼠标抬起的响应需要将CSpinButtonCtrl控件先子类化,然后再子类中响应WM_LBUTTONUP事件,在该事件的响应函数中发送消息给父窗口,这里博主发送的是自定义消息,然后再父窗口中接受该消息进行处理,即可响应Spin控件的鼠标抬起了。具体代码如下:
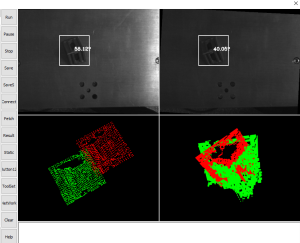
最近折腾MFC中的PCL点云显示,折腾了很久,尝试过OpenGL方案、VTK方案等,最终整理出一套最优的方案,决定使用VTK来显示点云。博主将显示整理成一个CVtkViewer类,该类继承自CStatic,直接修改Picture控件变量的类型就可以实现显示,对点云和图像接口进行封装,使用较为方便和安全。并且使用VTK显示的类封装可以在多个窗口分别显示,如左图所示可以在两个以上的窗口分别显示不同的点云,如果使用OpenGL来实现会相当麻烦。还有就是VTK这种上层接口封装非常全面,OpenGL太偏底层了,比如VTK会自动设置合适的相机位置,而OpenGL实现同样的效果就需要自己解算位置,这也是博主放弃OpenGL的重要原因。
在这篇博客之前,你需要对VTK开发有基本了解,博主使用的是VTK7.0,PCL1.8.0,博客中对博主遇到的编译错误、运行错误等都做了详细解释,希望能有帮助。